2011年8月2日
独立行政法人 理化学研究所
東海ゴム工業株式会社
床から車いすへの抱き上げ移乗ができる介護支援ロボット
- 抱き上げ重量80kgを達成した「RIBA-II」を開発 ―
ポイント
- 床上で寝ている人の抱き上げ移乗を世界で初めて実現
- オールゴムの柔軟触覚センサ(SRセンサ)を開発、柔軟性とセンシング精度を両立
- 高齢者介護施設でのモニター使用を進め、早期の商品化を目指す
要旨
独立行政法人理化学研究所(野依良治理事長)と東海ゴム工業株式会社(西村義明社長)が2007年8月になごやサイエンスパークに設立した「理研-東海ゴム人間共存ロボット連携センター」(RTC、細江繁幸連携センター長)は、介護支援ロボット「RIBA:Robot for Interactive Body Assistance(リーバ)-II」を開発しました。RIBA-IIは2009年8月に公開したRIBAの後継機です。新開発した柔軟触覚センサ(SRセンサ※1)を採用して、触覚によるロボット操作、被介護者の体重検知を実現し、さらに腰に2個の前後屈曲関節と補償ばね※2を導入した新機構を採用、抱き上げ重量を約30%増の80kgにしました。これにより、介護施設で最も重労働である床上で寝た状態の人を抱き上げて車いすへ移乗させることを可能にしました。これは、理研基幹研究所(玉尾皓平所長)RTC ロボット実用化研究開発チーム 郭チームリーダーらRTC全体による成果です。
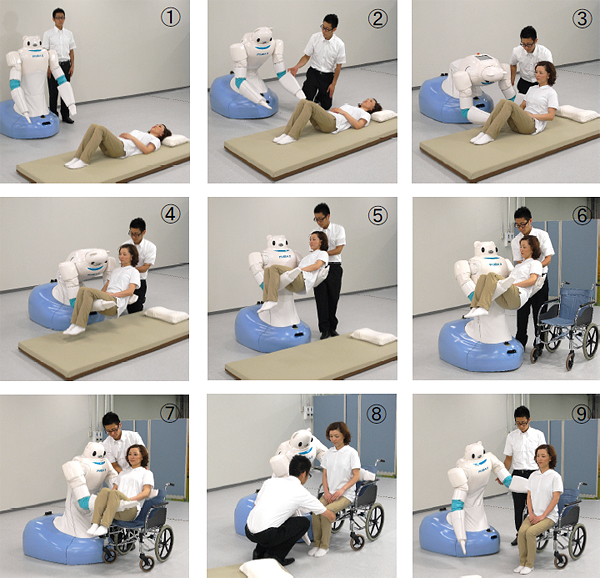
日本は急速に高齢化社会に向かっており、介護者不足が大きな社会問題になりつつあります。2015年には要介護者数が569万人になり、そのうち、認知症患者が442万人にもなるとされています(内閣府所管 公益法人エイジング総合研究センター予測)。介護施設では、ベッドからの落下を防ぐ目的で認知症患者が床上に寝ていることがあり、床から車いすへの移乗は2人がかりの重労働になります。このような作業を1人の介護士と1台のロボットによる協調作業で実現すれば、省人化だけではなく介護士の大幅な負荷軽減につながります。
RIBA-IIは、新開発したSRセンサを採用し、触覚によるロボット操作、被介護者の体重検知を実現しました。SRセンサはゴム製の静電容量型触覚センサとして世界初であり、印刷製法で成形でき、構成がシンプルで大面積に成形しやすいほか、柔軟、高耐久性などの特徴を持っています。SRセンサはロボット以外にも幅広い用途を持ち、東海ゴム工業ではこれを応用した床ずれ防止マットレスなどの開発も行っています。
今後、実用性をより一層追及し、東海ゴム工業の社会貢献活動※3を通して交流を深めてきた複数の介護施設の協力を得ながらモニター使用を行い、同社による早期の商品化を目指します。
RIBA-II開発の一部は、新エネルギー・産業技術総合開発機構(NEDO)の平成22年度イノベーション実用化助成事業によるものです。
背景
高齢の要介護者の増加に伴い、介護者不足の問題が深刻化し始めています。これを補うため、ロボット技術には大きな期待が寄せられています。高齢の要介護者をベッドや床から車いすに移乗させる作業は重労働であるにもかかわらず、1人の介護士が1日に約40回も行っており、その結果、多くの介護士が腰痛などに悩まされています(RTC調べ)。特に、ベッドからの落下を防ぐため床上に寝ている認知症患者などを車いすに移乗させるのは2人がかりの重労働です。これを1人の介護士と1台のロボットの協調作業で実現できれば、省人化だけではなく介護士の負荷軽減にもつながります。
理研は、人の抱き上げを目指したロボットRI-MANを2006年に開発しました(2006年3月13日プレス発表)。しかし、これは概念機であり、安全性、可搬重量など実用面では不十分でした。その後、2007年に理研と東海ゴム工業は、共同で介護ロボットの研究・実用化を目指すため、理研-東海ゴム人間共存ロボット連携センター(RTC)を設立し、RI-MANの成果を継承しながら実用化のための研究開発を開始、2009年にRIBAを開発しました。(2009年8月27日プレス発表)。RIBAは、理研の制御、センサ、情報処理技術と東海ゴム工業の材料、構造設計技術を融合し、双腕型ロボットとして世界で初めて人間(61kg)を実際に抱き上げて移乗させることに成功しました。しかし、介護施設で最も重労働である床上に寝た認知症患者などの抱き上げ移乗ができないこと、負荷重量が不十分であることなどの課題が残されていました。こうした課題を克服するため、研究グループは後継機の開発を続けてきました。
手法と成果
RIBA-IIには、姿勢を低くして床上に寝ている人を抱き上げるために、腰に2個の前後屈曲関節を設けました(図1)。これにより、床からの抱き上げとベッドからの抱き上げの両方ができるようになりました。さらに、モータの小型化と省電力化のために、腰関節に補償ばねを導入しました。その結果、無負荷で前方に屈曲するときはばねを引っ張る力を蓄積し、人を抱き上げるときはその復元力を利用することで、比較的小出力モータで人の抱き上げを可能にしました。また、触覚センサとして新開発したオールゴムのSRセンサを採用して、柔軟性とセンシング精度の両立を実現しました。
SRセンサには、静電容量を利用したC型と、電気抵抗を利用したR型の2種類があります(表1)。C型は柔軟ゴム電極※4を印刷した2枚のゴムシートで誘電層を挟んだサンドイッチ構造をしており、ゴム電極を用いた静電容量型触覚センサとしては世界初のものです(図2)。このセンサは、外部から力を受けて変形(薄くなる)した時に、電極間の静電容量変化(増加分)を検出して圧力を求めます。C型SRセンサは構造がシンプルで大面積に成形しやすく、柔軟、高耐久性の特徴があります。このC型SRセンサを、RIBA-IIの腕と胸に導入することで(図3)、被介護者の体重検出と触覚を用いたロボット操作を可能にしました。今後、被介護者の姿勢検出およびそれによる安全性向上の制御(落下防止、抱かれ心地向上)にも取り組みます。
一方R型SRセンサは、ポリマーに充填する導電性フィラー※5の粒子形状と量を最適化することにより、どのようなひずみでも導電パスが切断され、電気抵抗が増加する現象を利用した柔軟センサです。従来の導電性ゴムセンサに比べて応答が速いことが特徴です。RIBA-IIでは、走行時または抱き上げ時に人や異物との接触を検出し、危険と判断した場合に高速かつ自動的に停止する必要があります。また、握手などのイベント向けの機能も必要なため、台車部分や、抱き上げ時に人との接触を検知する必要があるハンド部分にR型SRセンサを埋め込んでいます(図3)。さらに、操作性・利便性向上のため、背中にタッチパネルを導入し、介護者が被介護者個々の介護データに基づいて動作指示や作業確認をできるようにしました。さらに介護者の指示通り自動移動できるようにライントレース自律走行※6を導入するなどの改良を行いました。
今後の期待
今後、東海ゴム工業の社会貢献活動を通して交流を深めてきた複数の介護施設の協力を得ながら、引き続き研究開発を行い、有用性の実証と課題の抽出を進めます。安全性、信頼性、操作性などを検証して、介護施設へのモニター使用を行い、早期の実用化を目指します。また、単なる移乗介助だけでなく、力制御による被介護者の機能回復のための部分介助や、リハビリテーション支援の応用研究も行っていきます。
発表者
理化学研究所
理研-東海ゴム人間共存ロボット連携センター
ロボット実用化研究開発チーム チームリーダー
(東海ゴム工業株式会社 新事業開発研究所 担当次長)
郭 士傑(かく しけつ)
Tel: 0568-77-4955 / 052-736-5867
Fax: 0568-77-2976 / 052-736-5871
お問い合わせ先
立行政法人理化学研究所
名古屋支所 名古屋研究推進室 室長
伊藤 博幸(いとう ひろゆき)
Tel: 052-736-5850 / Fax: 052-736-5854
報道担当
理化学研究所 広報室 報道担当
Tel: 048-467-9272 / Fax: 048-462-4715
補足説明
- 1.SRセンサ
SRはSmart Rubber(スマートラバー)の略。SRセンサとは東海ゴム工業が開発したスマートラバーを用いた独自の柔軟センサ。C型(静電容量型)とR型(電気抵抗増加型)の2種類がある。C型は、構造が単純で大面積に成形しやすく、柔軟、高耐久性があり、R型は、従来の導電性ゴムセンサに比べて応答性に優れている。東海ゴム工業は、RIBA-IIのために開発したSRセンサの特徴を生かして、ロボット以外の応用商品開発も行っている。例えば、九州大学と共同でC型を用いた床ずれ防止アクティブマットレスや床ずれ体圧センサ、またR型を用いた自動車分野などでの応用開発を行っている。
SRセンサは、さまざまな形状、大きさに成型することが可能なため、柔軟なセンシングデバイスとして多様な要望に対応できると期待される。 - 2.補償ばね
無負荷のときにモータの出力、または重力を利用してばねを引っ張ってエネルギーを蓄えておき、負荷がかかった際にそのエネルギーを解放させて負荷を分担させる。これにより、比較的小さなモータでも重量物を持ち上げることが可能になる。 - 3.社会貢献活動
東海ゴム工業とNPO法人全国福祉理美容師養成協会、金城学院大学生活環境学部、名古屋大学医学部の4者が協働してビューティーキャラバンという活動を行っている。ビューティーキャラバンとは、高齢者介護施設を訪問し、高齢者の方々にファッションやメイクのコーディネートを行い、おしゃれを体感していただくことで、「いつもその人らしく美しく過ごす」きっかけを作り、高齢者のQOL(Quality of Life)の向上に寄与する事業である。 - 4.柔軟ゴム電極
柔軟なセンサを実現するための重要な要素技術で、ゴムの弾性変形に応じて伸縮可能な柔軟性を持つとともに導電性を維持する電極のこと。東海ゴム工業が新規開発した柔軟ゴム電極は、弾性変形と繰り返し耐久性が優れている。 - 5.導電性フィラー
絶縁材料であるゴムや樹脂を導電化するために充填する材料。フィラーの粒子形状と量を最適化することにより、どのようなひずみでも導電パスが切断され、電気抵抗が増加する現象を東海ゴム工業が初めて発見し、応用開発した。 - 6.ライントレース自律走行
AGV(自動走行台車)の技術を応用し、床に設置した薄型磁気テープを認識して走行する技術。この技術により、タッチパネル操作だけで介護施設内の部屋間を人の介在なしでRIBA-IIが自動的に移動することが可能となった。 - 7.参考資料
RIBA-IIはRIBAの機能を生かしつつ、需要の多い床からの抱き上げ移乗を実現し、安全性、操作性の向上を主な開発項目とした。その機能、概略寸法、重量および工夫した主なポイントを下表に示す。
【RIBA-IIの概要】 機能 - ベッドと車いす間の移乗
- 床と車いす間の移乗(認知症患者を想定)
- 抱き上げ重量80kg
- ライントレース自律移動、ラインから外れた場合の自律復帰、移動時障害物検出
- タッチパネルによる条件設定、動作指示、作業内容確認等
寸法
重量- 高さ137cm、幅82cm、前後103cm
- 重量230kg(バッテリ含む)
外観
外装- 全身が柔軟素材で被われている
- 前腕、上腕、ハンド、胸、台車の計10箇所にSRセンサを使用、それを介して触覚によるロボット操作、被介護者体重検出、移動時障害物接触検出等を実現
- RIBAに比べて主な変更点
- (1) 床から抱き上げるときに被介護者に圧迫感を与えないように頭部を小さくした
- (2) 脇の隙間をなくし、指が巻き込まれるような危険をなくした
- (3) 筐体と柔軟層の分離成型によりメンテナンス性を向上させた
機構 - 関節自由度数は両腕7ずつ、腰3、台車3の合計20である
- RIBAに比べて主な変更点
- (1) 姿勢を低くして床から人を抱き上げるために腰に前後屈曲の関節を1個追加した
- (2) モータの小型化と省電力化のために腰関節に補償ばねを導入した
- (3) 首関節をなくし、固定した
- (4) 抱かれ心地向上のために前腕の幅を広くし、長さを成人男子の平均的肩幅に合わせた
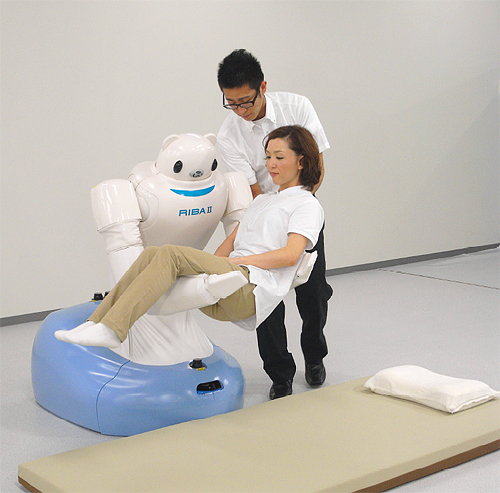
付図1 RIBA-II
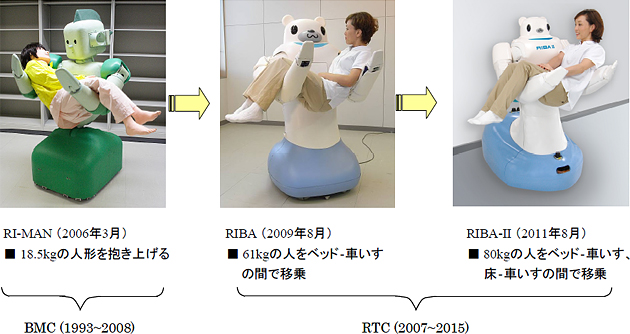
付図2 介護支援ロボット開発の経緯

付図3 認知症患者の床から車いすへの移乗作業(2人がかりの大変な重労働作業)

付図5 SRセンサを用いた測定

付図6 タッチパネル
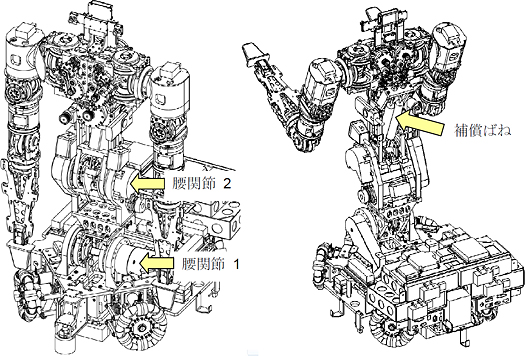
腰に2個の前後屈曲関節を設けることで姿勢を低くすることができ、床やベッドからの抱き上げができるようになった。さらに、腰関節に補償ばねを導入することによりモータの小型化と省電力化を実現した。
表1 C型SRセンサとR型SRセンサの原理
図2 C型SRセンサの構成(概念図)
柔軟ゴム電極を印刷した2枚のゴムシートで誘電層を挟んだサンドイッチ構造をしている。

図3 SRセンサの導入部位
直接被介護者と接する前腕内側、胸、上腕部位にC型SRセンサを導入し、被介護者の体重検出を行う。また触覚ガイダンス用に前腕外側、上腕部位にも同センサを導入している。ハンドと台車にはR型SRセンサが内蔵されており、抱き上げ時の被介護者との接触や走行時の障害物接触の検出を行う。