Aug. 2, 2011 Press Release Engineering
RIBA-II, the next generation care-giving robot
New robot boasts the latest in sensor technology, promises a brighter future for Japan's elderly population
A new robot using high-precision tactile sensors and flexible motor control technology has taken Japan one step closer to its goal of providing high-quality care for its growing elderly population. Developed by researchers at RIKEN and Tokai Rubber Industries (TRI), the new robot can lift a patient up to 80kg in weight off floor-level bedding and into a wheelchair, freeing care facility personnel of one of their most difficult and energy-consuming tasks.
With an elderly population in need of nursing care projected to reach a staggering 5.69 million by 2015, Japan faces an urgent need for new approaches to assist care-giving personnel. One of the most strenuous tasks for such personnel, carried out an average of 40 times every day, is that of lifting a patient from a futon at floor level into a wheelchair. Robots are well-suited to this task, yet none have yet been deployed in care-giving facilities.
In 2009, the RIKEN-TRI Collaboration Center for Human-Interactive Robot Research (RTC), a joint project established in 2007 and located at the Nagoya Science Park in central Japan, unveiled a robot called RIBA (Robot for Interactive Body Assistance) designed to assist in this task. The first robot capable of lifting a patient from a bed to a wheelchair and back, RIBA charted a new course in the development of care-giving robots, yet functional limitations prevented its direct commercialization.
RTC's new robot, named RIBA-II, overcomes these limitations with added power and functionality. New joints in the robot's base and lower back enable RIBA-II to crouch down and lift a patient off a futon at floor level (Figure 1), the most physically strenuous task for care-givers and one that RIBA was not able to do. RIBA-II accomplishes this task using newly-developed Smart Rubber sensors (Table 1, Figure 2, Figure 3), the first capacitance-type tactile sensors made entirely of rubber. Printed in sheets and fitted onto the robot's arms and chest, the sensors enable high-precision tactile guidance and allow RIBA-II to quickly detect a person's weight from touch alone, guaranteeing patient safety.
In the future, RTC researchers will work together with partner nursing care facilities to test RIBA-II and further tailor it to the needs of care-givers and their patients, while also developing new applications in areas such as rehabilitation. TRI aims to bring care-giving robots like RIBA-II to the market in the near future, promising support for aging populations in countries around the world.
Contact
Shijie Guo
Robot Implementation Research Team
RIKEN-TRI Collaboration Center for Human-Interactive Robot Research
RIKEN Innovation Center
Hiroyuki Ito
Nagoya Research Promotion Office
RIKEN Nagoya Facility
Jens Wilkinson
RIKEN Global Relations and Research Coordination Office
Tel: +81-(0)48-462-1225 / Fax: +81-(0)48-463-3687
Email: pr[at]riken.jp
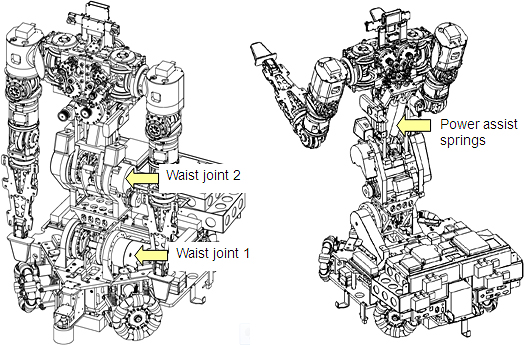
Figure 1: Mechanical assembly of RIBA-II
Table 1: Capacitance and resistance-type Smart Rubber sensors in RIBA-II
Figure 2: Structure of a capacitance-type smart rubber sensor.
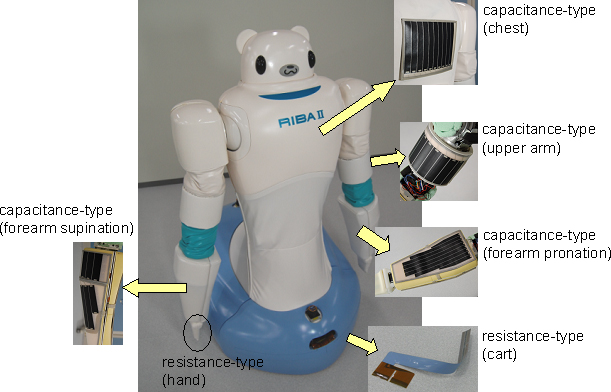
Figure 3: Locations of Smart Rubber sensors in RIBA-II
The capacitance-type Smart Rubber sensors in pronation of the forearms, the chest and the upper arms are used to measure the interaction forces between the held care receiver and the robot. Those in the supination of the forearms and the upper arms are used to operate the robot. The resistance-type Smart Rubber sensors in the hand and on the cart surface are used to detect contact with care receivers or barriers.