要旨
理化学研究所(理研)生命システム研究センター集積バイオデバイス研究ユニットの田中陽ユニットリーダー、東京電機大学の釜道紀浩准教授らの共同研究チーム※は、ミミズの筋肉組織を利用した小型ポンプを開発しました。
クリーンテクノロジーの開発目標の一つに、外部からの電力供給に依存せず、材料自体も全て自然に還元される機械の構築が挙げられます。栄養や酸素という化学エネルギーのみで機能を発現でき材料は自然に還元されるという点で、生物を材料とする機械は一つの理想形といえます。一方、水などを送る機械であるポンプは、微量サンプルの分析や体内埋め込み装置の開発など最先端研究分野において、小型化が求められています注1)。しかし、従来の機械工学による小型化では、電源やワイヤーなどが不可欠なため限界があります。そこで共同研究グループは、生体筋肉組織を利用することにより、小型で効率のよいポンプが実現できるのではないかと考えました。
共同研究チームは、生体組織の中でも制御性・応答速度・収縮力に優れたミミズの体壁筋に着目しました。まず、ミミズ筋肉シートの電気刺激に対する収縮力を測定したところ、最大9.3ミリニュートン(mN)(約0.95g重)、収縮するまでの応答時間は約0.3秒でした。これは一般の小型ポンプの素子と同程度の数値であり、ポンプの駆動素子として十分な力が得られることが分かりました。次に、ミミズ筋肉シートを用いた小型ポンプを試作しました。微細加工技術によりポンプの土台となるマイクロ流体チップ[1]上に幅・深さ0.2mmの流路と直径3mmのポンプチャンバーを作製し、その上に筋肉の収縮力を伝えるプッシュバーを置き、さらにミミズ筋肉シートを載せて固定しました。電気パルスで連続的に刺激を与えたところ、シートの収縮によりチャンバー内の水が押し出されて送液を確認できました。流量は5マイクロリットル/分(μL/分、1μLは100万分の1リットル)で、このサイズのポンプとしては既存のものに匹敵する機能を持つことを実証しました。
試作した「ミミズポンプ」は、刺激に電気を用いてはいるものの動作のためのエネルギー源はアデノシン三リン酸(ATP)です。神経組織なども含めて、人工的にミミズと同様の構造を作ることができれば電気なしでも使える可能性があることから、本成果は今後、超微小ポンプを開発していく上でのモデルになると考えられます。
本研究は、オランダの科学雑誌『Sensors and Actuators B, Chemical』掲載に先立ち、オンライン版(9月22日付け:日本時間9月22日)に掲載されました。
注1)2013年5月9日プレスリリース「マイクロ流体チップに使う小型電動バルブを開発」
※研究チーム
理化学研究所 生命システム研究センター 集積バイオデバイス研究ユニット
ユニットリーダー 田中 陽(たなか よう)
特別研究員 ヤリクン・ヤシャイラ(Yalikun Yaxiaer)
研修生 野口 裕司(のぐち ゆうじ)(東京電機大学大学院未来科学研究科 ロボット・メカトロニクス学専攻)
東京電機大学 未来科学部 ロボット・メカトロニクス学科
准教授 釜道 紀浩(かまみち のりひろ)
背景
クリーンテクノロジーの開発目標の一つに、外部からの電力供給に依存せず、材料自体も全て自然に還元される機械の構築が挙げられます。そこで、生物の持つシステムに目を向けると、その構成単位である細胞や組織は機能の詰まった機械素子と見なすことができます。電力ではなく栄養や酸素という化学エネルギーのみで機能を発現でき、材料は自然に還元されるという点で、生物を材料とする機械は一つの理想形といえます。
一方、水などを送る機械であるポンプは、エネルギーやスペースの低減が要求される、微量サンプルの分析や体内埋め込み装置開発などの最先端研究分野において、小型化が求められています。しかし、従来の機械工学による小型化では、電源やワイヤーなどが不可欠なため限界があります。そこで共同研究チームは、生体筋肉組織を利用することにより、従来の機械工学では困難な小型で高効率のポンプが実現できるのではないかと考えました。
田中陽ユニットリーダーらはこれまでに、新生ラットの心筋細胞を用いたポンプやシビレエイを用いた発電機注2)など、生物が持つ細胞・組織機能をマイクロ流体デバイスに実装する技術[2]を開発してきました。ポンプについては、自在に伸縮操作ができる制御性、1秒以内の応答速度、1ミリニュートン(mN、約0.1g重)以上の収縮力、流体制御のために体積変化ができる環状または袋状の組織構造といった、さまざまな条件を満たす必要があります。しかし、共同研究チームが以前に開発した新生ラット心筋細胞ポンプは、心筋が拍動するため制御性に欠け、収縮力もマイクロニュートン(μN、1μNは100万分の1ニュートン、約1000万分の1g重)レベルと弱く、既存デバイスを代替するには及ばないものでした。
注2)2016年5月31日プレスリリース「シビレエイ発電機」
研究手法と成果
今回、共同研究チームは、ミミズの体表を構成する体壁筋に着目しました。環状構造を持ちながら制御性、応答速度、収縮力に優れる体壁筋を材料とすることで、集積性や機械性の面で既存のポンプに匹敵する小型の「ミミズポンプ」が実現できるのではないかと考えました(図1)。
まず、ミミズ筋肉シートの機械的特性を測定しました。フトミミズを輪切りにして開き、幅約1cmのシート状にして電圧6Vの電気刺激に対する収縮力を測定しました。その結果、最大9.3mN(約0.95g重)、収縮するまでの応答時間は約0.3秒でした(図2)。これは一般に小型ポンプの駆動素子として用いられる同サイズの圧電素子[3]と同程度の性能であり、ミミズ筋肉シートからポンプの駆動素子として十分な力が得られることが分かりました。
また、ミミズ筋肉シートの基礎的特性を調べるために、シートの長さや力の測定方向を変えたときにどのくらい収縮力が変化するかを測定しました。その結果、収縮力は、横方向(体節線に沿った方向)の方が縦方向よりも大きく、またシートが長いほど大きいことが分かりました(図3)。
次に、ミミズ筋肉シートを用いた「ミミズポンプ」を試作しました。まずは微細加工技術により、ポンプの土台となるマイクロ流体チップを作製しました。チップ上には幅と深さが0.2mmの微細流路、直径3mmのポンプチャンバー、逆止弁などを作製し、この上に筋肉の収縮力を伝えるプッシュバーという構造体を置き、さらにミミズ筋肉シートを載せて針で固定しました(図4)。
シートに、電圧6Vの電気パルス(持続時間0.3秒)で3秒おきに連続的に刺激を与えたところ、シートの収縮によりチャンバー(空洞)内の水が押し出されて送液が確認できました。流量は5マイクロリットル/分(μL/分、1μLは100万分の1リットル)で、これまでの新生ラットの心筋細胞を用いたポンプに比べて1,000倍以上の量でした。このサイズのポンプとしては、既存の圧電素子を用いたものに匹敵する機能を持つことを実証しました。
今後の期待
本研究で試作したミミズポンプは、刺激に電気を用いているものの、動作のためのエネルギー源は生体の共通エネルギー源であるアデノシン三リン酸(ATP)です。神経組織なども含めて、人工的にミミズと同様の構造を作ることができれば、将来的には電気刺激なしで駆動する可能性があります。そのため本成果は、今後、超微小ポンプを開発していく上でのモデルになると考えられます。
また、電力不要の超小型ポンプができれば、電気使用に向かない下水管内のロボットや血管内ロボットなど、工業・医療などさまざまな分野での応用が期待できます。
原論文情報
- Yo Tanaka, Yuji Noguchi, Yaxiaer Yalikun, Norihiro Kamamichi, "Earthworm muscle driven bio-micropump", Sensors and Actuators B, Chemical, doi: 10.1016/j.snb.2016.09.123
発表者
理化学研究所
生命システム研究センター 細胞デザインコア 合成生物学研究グループ 集積バイオデバイス研究ユニット
ユニットリーダー 田中 陽(たなか よう)
 田中 陽
田中 陽
東京電機大学 未来科学部 ロボット・メカトロニクス学科
准教授 釜道 紀浩(かまみち のりひろ)
報道担当
理化学研究所 広報室 報道担当
Tel: 048-467-9272 / Fax: 048-462-4715
学校法人東京電機大学
総務部 企画広報担当
Tel: 03-5284-5125 / Fax: 03-5284-5180
keiei [at] jim.dendai.ac.jp(※[at]は@に置き換えてください。)
補足説明
- 1.マイクロ流体チップ
バイオ分析や化学分析(システム)をマイクロスケール化する目的で、溶液の混合、反応、分離、精製、検出などの化学操作をミクロ化したデバイスのこと。半導体製造技術(微細加工技術)を用いて基板に集積化する。 - 2.生物が持つ細胞・組織機能をマイクロ流体デバイスに実装する技術
田中陽ユニットリーダーらがこれまで開発してきた、心筋細胞ポンプや血管デバイス、シビレエイ発電機などの細胞と、サイズが適合するマイクロ流体デバイスを融合した新原理のデバイスを作成する技術。 - 3.圧電素子
圧電効果を利用した受動素子のこと。圧電体に加えられた力を電圧に変換したり、電圧を力に変換したりする。アクチュエータ(駆動装置)、センサとしての利用の他、アナログ電子回路での発振回路やフィルタ回路にも用いられる。
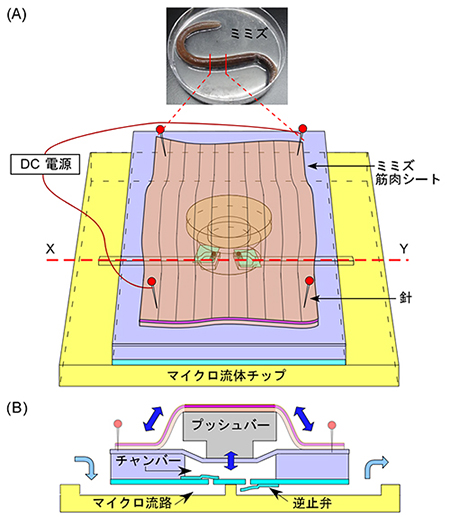
図1 ミミズポンプの構造と送液原理
(A)はミミズポンプを俯瞰した模式図、(B)は(A)のX-Y断面図を表す。微細加工技術によりポンプの土台となるマイクロ流体チップ上に微細流路とポンプチャンバーを作製し、この上に筋肉の収縮力を伝えるプッシュバーという構造体を置き、ミミズ筋肉シートを載せて針で固定する。ミミズ筋肉シートに電気パルスで連続的に刺激を与えて収縮させることで、左側のマイクロ流路の水はポンプチャンバー内に入り、逆止弁から押し出されて右側の流路へ送られる。
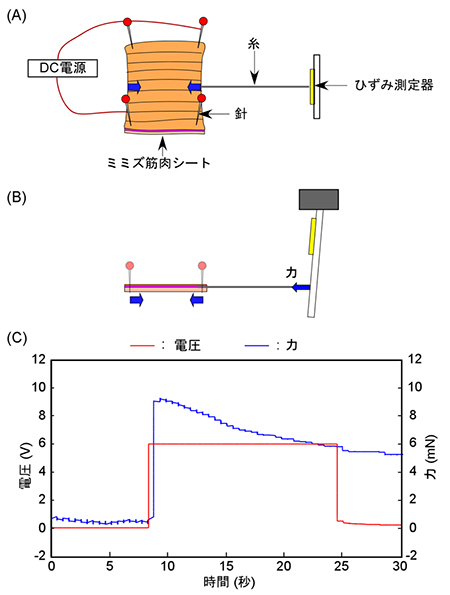
図2 ミミズ筋肉シートの機械的特性の測定
(A)、(B)は今回の測定方法の模式図、(C)は測定結果を示す。DC電源を接続した約1cm幅のミミズ筋肉シートとひずみ測定器を糸で接続し、電圧をかけることでミミズ筋肉を収縮させた。ミミズ筋肉の収縮によるひずみ測定器の傾きから収縮力を計測した。6Vの電圧で収縮させたところ、最大で9.3mN(9.5g重)の収縮力が得られた。また、電圧をかけてから収縮するまでの応答時間は0.3秒であった。(C)で赤線は電圧、青線は力を示している。
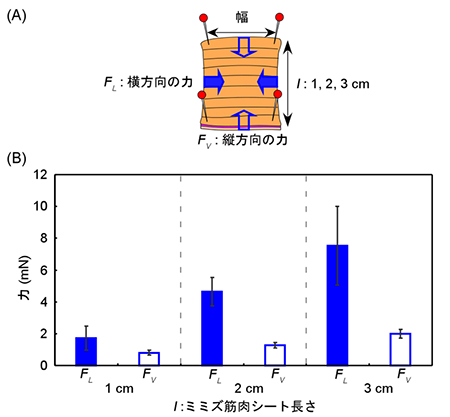
図3 ミミズ筋肉シートの方向と長さによる収縮力の違い
(A)は測定法の模式図。ミミズ筋肉シートの縦の長さを1、2、3cmと変えて収縮力を測定した。(B)は測定結果。シートの収縮力は、横方向(体節線に沿った方向、青の棒グラフ)の方が縦方向(白の棒グラフ)よりも大きく、シートが長いほど大きいことが分かる。
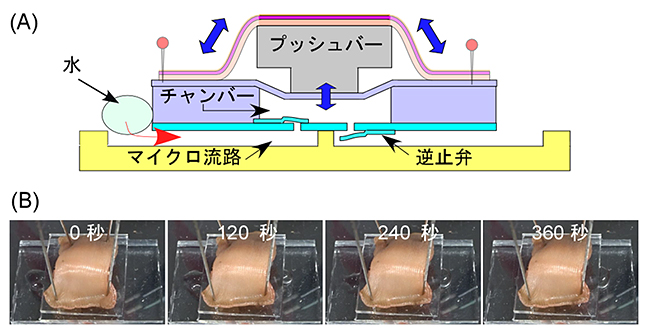
図4 ミミズポンプの実証実験
(A)はミミズポンプによる水の送液実証実験の模式図。ミミズ筋肉シートに電圧6Vの電気パルス(継続時間0.3秒)で3秒おきに連続的に刺激を与えた。(B)は刺激開始後の各時間のビデオフレーム。シートの収縮により、水が左側からポンプを通って右側へ押し出さており、送液が確認できた。