理化学研究所(理研)生命機能科学研究センターバイオコンピューティング研究チームの髙橋恒一チームリーダー、落合幸治大学院生リサーチ・アソシエイト、網膜再生医療研究開発プロジェクトの許沢尚弘大学院生リサーチ・アソシエイトらの共同研究グループは、ヒューマノイドロボット(ヒト型ロボット)と人工知能(AI)ソフトウェアを組み合わせることで、人間の手と頭を介さない自律細胞培養システムを開発しました。
本研究成果は、生物学実験の自動化による研究効率の向上、手法の標準化ならびに、遠隔実験・自動実験が要請されるコロナ時代の新研究スタイルの確立に資するものとして期待できます。
今回、共同研究グループは、これまで人間が行ってきた基礎研究における細胞培養の動作・判断を、ロボットとAIに置き換えるシステムを開発しました。これは、培養動作を行う「手」に相当する部分として既存の汎用ヒト型ロボットLabDroid「まほろ」[1]を用い、細胞の観察結果を判断する「頭」に相当するAIソフトウェアを新たに開発し、結合させたものです。本システムの性能の実証実験としてヒト胎児腎(HEK293A)細胞[2]の維持培養を行い、実際に自律細胞培養が実行可能であることを示しました。
本研究は、科学雑誌『SLAS Technology』オンライン版(12月3日付:日本時間12月4日)に掲載されます。
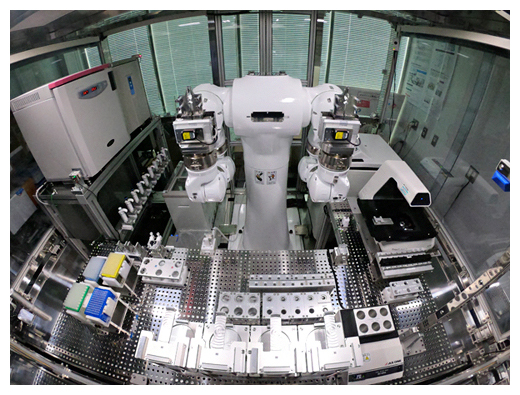
人間の代わりに実験をするヒューマノイドロボットと周辺機器
背景
再生医療で使用される組織や臓器の原料となる高品質な細胞の生産効率化は、再生医療の標準化と普及に向けた最重要課題の一つです。しかし、現状では多くの場合、細胞の培養・製造は熟練細胞技術者による匠の技に依存しています。
この問題を解決する選択肢として、プロセスの機械化や自動化により、人間の判断や操作を減らしていく方法があります。これまでに、多くの自動培養装置が上市されていますが、その多くは主に細胞製造や大量調製を指向した筐体(きょうたい)でした。これらのシステムでは、構成や用途が固定されていることが多く、決まった細胞を決まった手順で大量生産することに長けている一方で、手順が確定する前のいわゆる基礎研究や条件検討の段階での利用には向いていませんでした。
そこで、共同研究グループは、基礎研究における細胞培養の自動化に焦点をあて、ヒューマノイドロボット(ヒト型ロボット)と人工知能(AI)の統合による、自律的な細胞培養が実行可能なシステムの開発に取り組みました。
研究手法と成果
通常、人間による細胞培養では、細胞培養用プレートに播いた細胞を観察し、その増殖度合いに基づいた実験スケジュールの設定と判断を行い、細胞を新しいプレートに植え継ぐ操作(継代操作)を繰り返します。本研究では、この観察・判断・操作をロボットとAIに自律的に実行させることを試みました(図1)。
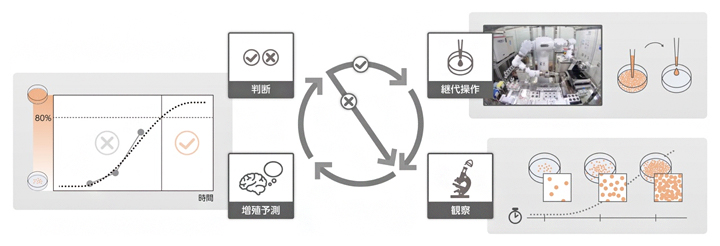
図1 本研究で開発した自律培養システムの概要
細胞培養に必要な「観察」「判断」「継代操作」をロボットとAIが自律的に実行する。また、過去の情報を用いた「増殖予測」も行う。
将来的な動作の拡張性を検討し、ロボット筐体にはLabDroid「まほろ」を採用しました。LabDroid「まほろ」は人間のような双腕を備え、人間が使うピペットや細胞培養用プレートなどの実験器具をそのまま使用し、人間の実験操作を模倣することが可能です(図2上)。一方で、LabDroid「まほろ」は単なるロボットであり、人間による指示なしには動作することはできません。本研究では、LabDroid「まほろ」と、ロボットをコントロールする「頭脳」に相当するAIソフトウェアを組み合わせることで、自律細胞培養システムを構築しました。今回開発したAIソフトウェアには、以下の五つの機能を実装しました(図2下)。
- 1)統括プログラム:
下記2)~4)の機能の実行タイミングを制御し、次にいつどの細胞プレートを観察するか、または継代するかを管理する。 - 2)細胞密度計算モジュール:
細胞観察ごとに顕微鏡画像から画像処理を行い、細胞密度を算出する。 - 3)細胞増殖予測モジュール:
対象細胞の細胞増殖曲線を推定し、人間によってあらかじめ指定された細胞密度値を超える時間を予測する。 - 4)ロボット操作モジュール:
事前にロボットに登録された動作を組み合わせ、消耗品や試薬の残量を考慮しながら、適切な動作(細胞観察や細胞継代)を実行する。 - 5)Webダッシュボード:
Webブラウザを介してシステムの状態や細胞増殖曲線をグラフィカルに表示することで、人間が自律培養システムの現状を把握できるようにする。
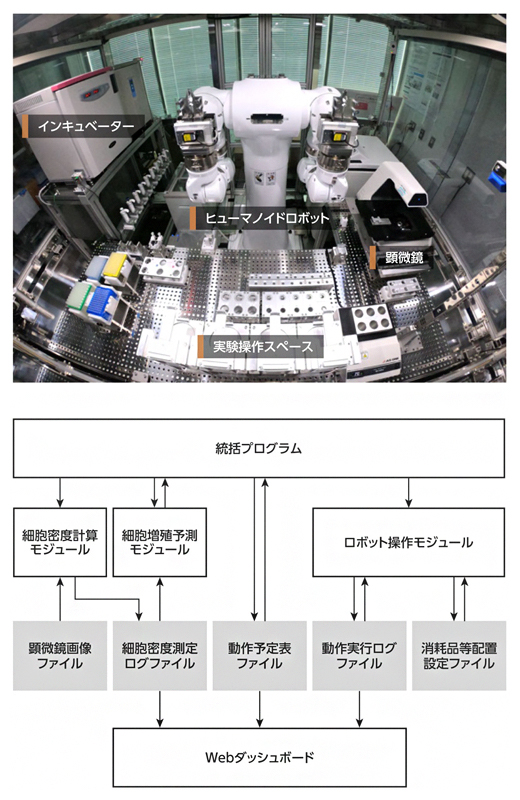
図2 本研究で開発した自律培養システムの構成
- 上)実験を実行するロボットハードウェア。ヒューマノイドロボットと周辺機器。
- 下)実験を制御するAIソフトウェア。実装された五つの機能(白色)とファイルデータ(灰色)の関係を示す。矢印はプログラムの流れ。顕微鏡観察画像とそれをもとに算出された細胞密度、細胞増殖予測の結果、システムの実行状況などが入出力され、ファイルに格納されたデータはブラウザを介して人間も把握できる。
これらのAIソフトウェアにより、以下の一連の繰り返し作業を人間の介入なしに自律的に実行することが可能になりました。まず、AIソフトウェアは12時間ごとに顕微鏡による細胞観察をロボットに指示し、観察が実行されます。顕微鏡画像から細胞面積値が算出され、細胞面積値から細胞の増殖曲線が予測されます。この予測から、人間が事前に設定した細胞面積密度(プレート表面が細胞で占められている割合)の目標値に到達する至適継代操作実施時刻が算出されます。至適継代操作実施時刻に到達すると、AIソフトウェアがロボットに継代操作を指示し、操作が実行されます。
実際に本システムを用いて、ヒト胎児腎(HEK293A)細胞の自律培養を実行したところ、12時間ごとの細胞観察とその結果に基づいた指定細胞密度(80%)での継代操作が正しく実行されました(図3)。9日間にわたる試験中に、重大なシステムエラーやコンタミネーション[3]が発生することはありませんでした。
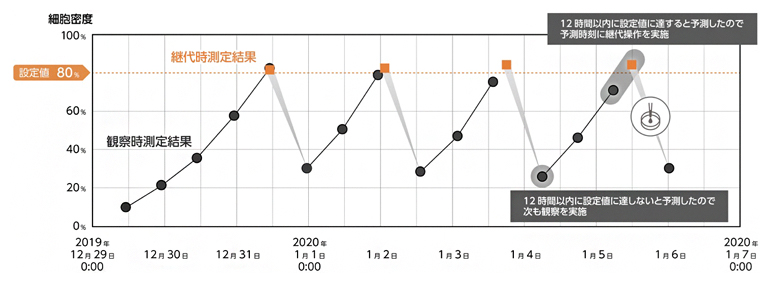
図3 HEK293A細胞の自律継代
2019年12月29日から2020年1月6日までの9日間にわたる自律継代の記録。縦軸は細胞密度、横軸は時間経過を表す。AIとロボットにより自律的に指定細胞密度(80%)近辺での継代操作が実行され、継代後の細胞密度は継代前の約3分の1になるようにプログラムされている。丸は12時間ごとの細胞観察を示し、細胞密度が自動的に取得された。四角は継代操作を示し、過去のデータからAIが指定細胞密度の到達時刻を予測し、ロボットが実行した。なお、培養開始時の細胞密度を変えた場合や、指定細胞密度を60%にした場合も継代操作が正しく実行された。
今後の期待
本研究では、汎用ヒト型ロボットとAIソフトウェアを組み合わせることで、人間が途中介在することなく、哺乳類細胞を維持培養し続けることに成功しました。今後は、対象細胞の拡充や、より複雑な条件分岐が実装されることにより、さまざまな細胞種の培養や、生命科学研究の効率向上や加速に寄与するものと考えられます。
また、昨今の新型コロナウイルス感染症の流行は、研究施設の停止や立ち入り制限など学術研究に多大な影響を及ぼしているという指摘があります注1)。本研究の結果は、遠隔実験・自動実験が要請されるコロナ時代の新研究スタイルの確立に資するものとして期待できます。
さらに近年、特に生命科学分野において、人間の手作業による実験操作では、実際にどのように操作したのかの客観的な記録(ログ)が欠落しており、後から検証することが極めて難しいという問題が指摘されています。実験をロボットに任せることにより、トレーサビリティ(追跡可能性)が担保された客観的なログの取得が可能になるため、実験の実行記録と結果の生データを結合した新たなデータサイエンスの創出につながると期待できます。
補足説明
- 1.汎用ヒト型ロボットLabDroid「まほろ」
ロボティック・バイオロジー・インスティテュート株式会社(株式会社安川電機の完全子会社)により開発された生命科学実験用のヒューマノイドロボットシステム。株式会社安川電機の産業用7軸双腕ロボットの周辺に、人間が実験で用いるものと同じ実験器具を配置している。ピペット操作やインキュベータの扉の開け閉めなど、人間が手で行っていた実験操作がロボットでも実行可能になった。 - 2.ヒト胎児腎(HEK293A)細胞
細胞生物学実験に一般的に用いられるHEK293の細胞株の一つ。ヒト胎児の腎細胞から樹立された。単層に増殖するため観察しやすく、またプレート上への接着が強く扱いやすいなどの性質から、本実証実験に用いた。 - 3.コンタミネーション
実験試料の汚染のこと。ここでは特に、培養中の細胞に細菌などが意図せず混入してしまうこと。
共同研究グループ
理化学研究所 生命機能科学研究センター
バイオコンピューティング研究チーム
チームリーダー 髙橋 恒一(たかはし こういち)
大学院生リサーチ・アソシエイト 落合 幸治(おちあい こうじ)
研究員 堀之内 貴明(ほりのうち たかあき)
網膜再生医療研究開発プロジェクト
プロジェクトリーダー(研究当時) 髙橋 政代(たかはし まさよ)
(現 客員主幹研究員)
大学院生リサーチ・アソシエイト 許沢 尚弘(もとざわ なおひろ)
テクニカルスタッフII(研究当時) 寺田 基剛(てらだ もとき)
研究員 増田 智浩(ますだ ともひろ)
研究員 神田 元紀(かんだ げんき)
ロボティック・バイオロジー・インスティテュート株式会社
代表取締役社長 松熊 研司(まつくま けんじ)
取締役 夏目 徹(なつめ とおる)
チームリーダー 亀井 泉寿(かめい もとひさ)
開発員 工藤 拓(くどう たく)
京都大学 医学部 眼科学教室
教授 辻川 明孝(つじかわ あきたか)
研究支援
本研究は、科学技術振興機構(JST)未来社会創造事業の探索加速型「共通基盤」領域(運営統括:長我部信行)における研究開発課題名「ロボティックバイオロジーによる生命科学の加速」(研究開発代表者:髙橋恒一)による支援および新エネルギー・産業技術総合開発機構(NEDO)の委託業務により行われました。
なお、JST未来社会創造事業の探索加速型「共通基盤」領域「ロボティックバイオロジーによる生命科学の加速」は、同事業の令和2年度新規本格研究課題に決定しました。
参考資料: 科学技術振興機構 未来社会創造事業(探索加速型)における令和2年度新規本格研究課題の決定について
原論文情報
- Koji Ochiai*, Naohiro Motozawa*, Motoki Terada, Takaaki Horinouchi, Tomohiro Masuda, Taku Kudo, Motohisa Kamei, Akitaka Tsujikawa, Kenji Matsukuma, Tohru Natsume, Genki N. Kanda, Masayo Takahashi, Koichi Takahashi# (*Co-first, #Lead contact), "A variable-scheduling maintenance culture platform for mammalian cells", SLAS Technology, 10.1177/2472630320972109
発表者
理化学研究所
生命機能科学研究センター バイオコンピューティング研究チーム
チームリーダー 髙橋 恒一(たかはし こういち)
大学院生リサーチ・アソシエイト 落合 幸治(おちあい こうじ)
網膜再生医療研究開発プロジェクト
大学院生リサーチ・アソシエイト 許沢 尚弘(もとざわ なおひろ)
 髙橋 恒一
髙橋 恒一
報道担当
理化学研究所 広報室 報道担当
お問い合わせフォーム
科学技術振興機構 広報課
Tel: 03-5214-8404 / Fax: 03-5214-8432
Email: jstkoho [at] jst.go.jp
産業利用に関するお問い合わせ
JST事業に関すること
科学技術振興機構 未来創造研究開発推進部
水田 寿雄(みずた ひさお)
Tel: 03-6272-4004
Email: kaikaku_mirai [at] jst.go.jp
※上記の[at]は@に置き換えてください。