2021年9月29日
理化学研究所
最適な未来予想の実現化をモニターする神経細胞の発見
-魚の脳内モデル解読のための仮想現実空間実験システムを開発-
理化学研究所(理研)脳神経科学研究センター意思決定回路動態研究チームの岡本仁チームリーダー、鳥越万紀夫研究員らと理論神経科学者との共同研究グループは、魚が安全な場所へ逃避するのに最適な未来の状態を予測する脳内モデルを形成し、脳内モデルと現実の状況を比較して「予測誤差」を算出し、予測が実現化されているかどうかをモニターすること、さらに予測誤差の最小化によって、最適な危険回避行動を取ることを明らかにしました。
私たちが日々安全に暮らすには、自らが置かれた環境の中で、どこが危険でどこが安全かを学び、将来の安寧を得るために現在望まれる状況を予測し、現実の状況との差を評価し、これらの情報を次に取るべき行動に反映させることが重要です。
ゼブラフィッシュ[1]の脳はその小ささにもかかわらず、基本的な構造が哺乳類の脳と共有していることから、共同研究グループはゼブラフィッシュ成魚専用の新しい「仮想現実空間実験システム」を考案し、その中で泳ぐゼブラフィッシュが危険を回避する行動を学ぶ過程において、脳の神経細胞集団の活動がどのように変化するか調べました。その結果、ゼブラフィッシュの脳のうち、哺乳類の大脳皮質に相当する部分で、予測誤差を表現する神経細胞集団が活動することを見いだしました。そして、ゼブラフィッシュがこれらの神経細胞集団の活動を最小にするように行動する結果、最も素早い逃避行動ができるようになることを明らかにしました。
本研究は、オンライン科学雑誌『Nature Communications』(9月29日付)に掲載されます。
背景
職場で起きた火災など身に迫る危険から逃げるとき、一番近道の逃避経路を思い浮かべることができれば効率的に逃げられますが、そうでなければ右往左往しながら逃げることになります。もし避難訓練で、あらかじめ誰からも最適な経路を教えてもらえない場合、私たちは試行錯誤を繰り返して初めて、どこに非常口があり、どのような経路や手順(ドアノブを回すなど)を経れば、最も確実に避難できるのかを予測できます。
その後、実際に火災が起きて首尾良く避難するには、このような経験を思い出し、自分が取っている避難行動が予測通りの経路や段取りをたどっているかを見極めながら、時々刻々とどのように振る舞うべきかを決めること(意思決定)が必要になります。しかし、このような訓練によって脳内につくられた(学習された)将来の最適な状況に関する予測(脳内モデル)と現実の状況との違い(予測誤差)が、実際にどのように脳内で表現され、意思決定行動に寄与しているのかは明らかにされていません。
ゼブラフィッシュの成魚には、その場その場の状況に即した行動を学習する能力があります。ゼブラフィッシュの脳の最も前方の「終脳[2]」と呼ばれる部分には、哺乳類の大脳皮質、海馬、扁桃体、および大脳皮質と協力してどのような行動を選択するのかに深く関わる大脳基底核に相当する構造が含まれています(図1)。ゼブラフィッシュの脳は、マウスやヒトの脳に比べて非常に小さく、脳の大部分の領域で神経活動を一挙に観察すること、さらに、体表の色素が欠損している変異種を使用すると、頭蓋骨を開かずに終脳の神経活動を生きたまま観察することができます。従って、ゼブラフィッシュ成魚は、終脳による行動制御の普遍的なメカニズムを明らかにするための適切な動物モデルになる可能性があります。
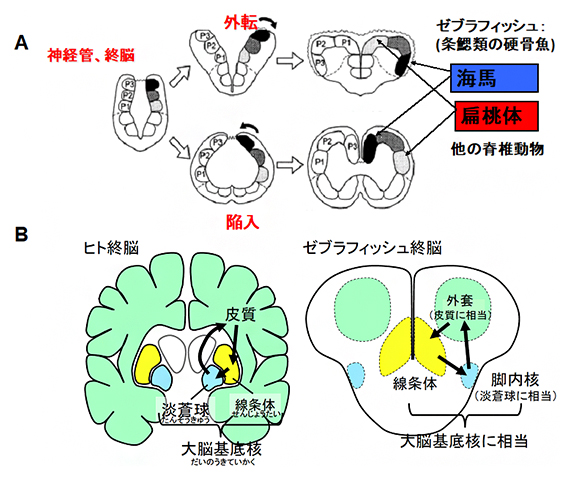
図1 魚類と脊椎動物の脳発生機構の比較
- (A)ゼブラフィッシュの終脳には、哺乳類を含む他の脊椎動物における大脳皮質、海馬、扁桃体に相当する領域が含まれている。ゼブラフィッシュが属する硬骨魚類は、脳の発生過程で神経管(脳)の最も背中側が開いていくような運動(外転)により形成される。一方、他の脊椎動物では、神経管(脳)の同じ部分が内部にもぐり込むような運動(陥入)により形成される。そのため、対応するそれぞれのパーツの終脳内での位置が、ゼブラフィッシュの終脳では他の脊椎動物のパーツの位置と比べて逆転している。
- (B)ゼブラフィッシュ成魚においても、ヒトにおける皮質、大脳基底核の線条体と淡蒼球にそれぞれ相当する外套、線条体、脚内核が存在する。
実験神経科学と理論神経科学という専門が異なる複数の研究者で構成した共同研究グループは、ゼブラフィッシュ成魚に仮想現実空間の中で電気ショックから逃れるための適切な行動を訓練によって習得させるという課題を用意し、その課題遂行中の終脳の神経活動を観察することで、脳内モデルによる予測と現実との予測誤差が、神経細胞の活動としてどのように表現されているのか、そしてそのような活動がどのように行動に反映されるのかを明らかにすることを試みました。
研究手法と成果
共同研究グループは、魚に仮想現実空間内を泳いでいるように感じさせるため、生きた魚が尻尾を自由に動かせる状態で頭部だけを固定し、その尻尾の動きに応じて、魚の左右、底、前方の四方に設置されたディスプレイに映し出される景色を後ろ方向に動かすようにしました(図2)。この「仮想現実空間実験システム」により、魚は尻尾を振ることによってあたかも前向きに泳いでいるように感じます。
仮想現実空間内を泳がせる魚には、神経細胞がその興奮に伴って細胞内のカルシウムイオンの濃度が上昇するという性質を利用して、カルシウムイオンと結合すると蛍光の強度が高くなるタンパク質を神経細胞で発現させた遺伝子組改変ゼブラフィッシュ[3]を用いました。このカルシウムイオン濃度に依存した蛍光強度の変化を2光子レーザー顕微鏡[4]を用いて観察することで、神経細胞集団内の神経細胞一個一個の活動を計測できます(図2)。
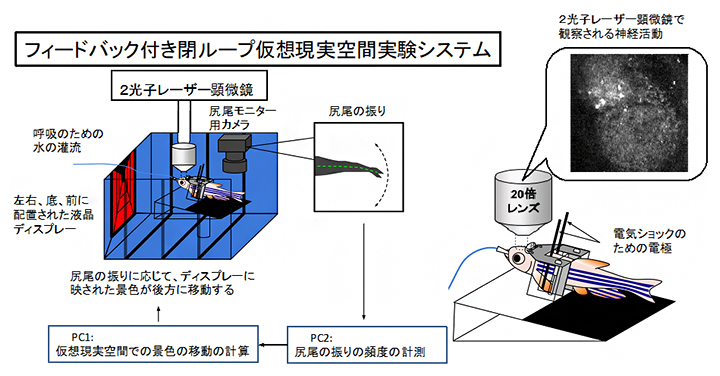
図2 今回考案したフィードバック付き閉ループ仮想現実空間実験システム
- 左:仮想現実空間は左右、底、前に配置した四つの液晶ディスプレイで魚に提示される。魚の尻尾の振りの頻度に応じてその景色が後方に移動するようなフィードバック機構を持った、閉ループ仮想現実空間になっている。この仮想現実空間内で電気ショックから逃れるための適切な行動をゼブラフィッシュ成魚に学習させることができる。
- 右:仮想現実空間内で電気ショックから逃れる訓練を行っているゼブラフィッシュ成魚終脳の神経細胞群の実際のカルシウムイメージング画像。
この仮想現実空間の中で、魚にGO課題とNOGO課題という二つの規則の下で電気ショックを受けないための行動を学習させました(図3)。魚を取り囲むディスプレイには、初め白色が提示されています。GO課題が始まると、魚がいるところが青色に、泳いでいく先が赤色に変わり、魚は尻尾を振って10秒以内に先にある赤色領域に逃げなければ、電気ショックを受けることになります。
一方、NOGO課題では壁の色が白から魚がいるところが赤色に、先にある領域が青色に変わり、魚は10秒間赤色領域にとどまらなければ、電気ショックを受けることになります。この2種類の試行をランダムに入れ替えて繰り返すと、やがて魚は両方の規則での正しい回避行動を学習しました。
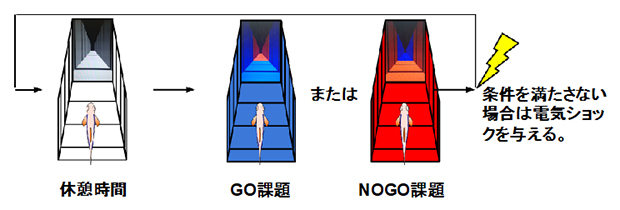
図3 仮想現実空間において行ったGO/NOGO課題
魚は仮想現実空間において現在自分のいる領域の色が白から青に変わったか、白から赤に変わったかによって、適切な行動(前に進む、もしくはとどまる)を取るように訓練される。
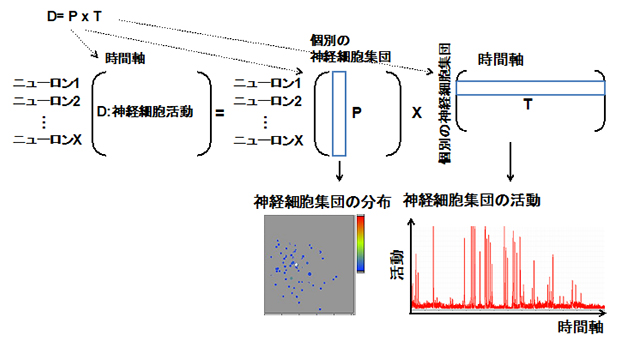
この魚の回避行動学習が成立する前から成立した後までの全過程において、終脳の神経細胞集団の活動の変化を測定しました。終脳全体での神経細胞集団の活動のパターンは、それぞれが固有の機能的意味を持つ個別の神経細胞集団の活動が重ね合ってできると考えられています。脳全体の神経細胞集団の活動パターンに、非負値行列因子分解(NMF)[5]という数学的手法を適用すると、脳全体の神経細胞集団の活動パターンを、それぞれが固有の機能的意義を持つ個別の神経細胞集団の活動に分解できます。さらには、それぞれの神経細胞集団がどのタイミングで活性化されるのかを調べれば、それぞれの神経細胞集団の機能的意義を知ることができます(図4)。
共同研究グループは、仮想現実空間内での行動学習が進むにつれて、魚が周囲の青色や赤色を見ると、見ている色に対応して活動し始める神経細胞集団があることを発見しました。また、行動学習が成立した魚に対し、GO課題において、一定時間以内に逃げないと電気ショックを受けるという色を青色から赤色に規則を逆転させたところ、これらの神経細胞集団は学習が進むにつれて活動しなくなりました。このことから、元々の規則において青色を見ると活動し始める神経細胞集団は「青色は危険である」という規則を、赤色を見ると活動し始める神経細胞集団は「赤色は安全である」という規則を脳で表現していると解釈できます(図4)。
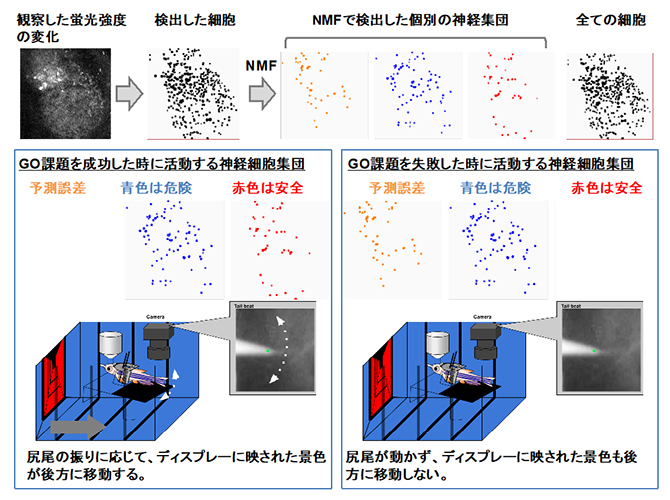
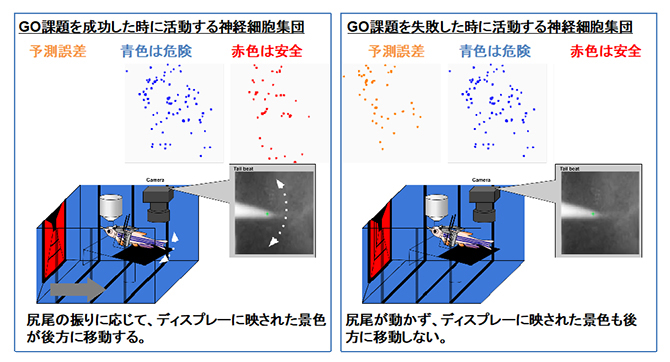
図4 本研究で見つかった神経細胞集団とその活動の挙動
- 上:2光子レーザー顕微鏡で捉えた蛍光強度の変化の動画を解析し(左図)、細胞を検出する(中図)。その後、全細胞の学習前から後まで全ての活動に対し非負値行列因子分解(NMF)を適用することで、神経細胞集団の活動パターンを、それぞれが固有の機能的意義を持つ個別の神経細動集団に分解する(右図)。それぞれの神経細動集団活動のタイミングを魚の行動、見ている色などと比較することで、その機能的意義を特定した。
- 左下:魚がGO課題において青色から赤色領域への逃避行動に成功したときの3種類の細胞集団、すなわち予測誤差、青色は危険であるという規則、赤色は安全であるという規則を表現している神経細胞集団の活動と、そのときの魚の行動(尻尾のフリ)の動画。GO課題が始まると、青色は危険であるという規則を表現する神経細胞集団の活動が上がり、安全な赤色領域に到達すると赤色は安全であるという規則を表現する神経細胞集団が活動し始める。この過程において予測誤差を表現する神経細胞集団の活動は上がらない。
- 右下:魚がGO課題において青色領域から逃げないで、逃避に失敗したときの3種類の細胞集団、すなわち予測誤差、青色は危険であるという規則、赤色は安全であるという規則を表現している神経細胞集団の活動とその時の魚の行動(尻尾のフリ)の動画。GO課題が始まると青色は危険であるという規則を表現する神経細胞集団の活動が上がり、その後予測誤差を表現する神経細胞集団が活動し始める。この過程において、魚は赤色の領域に達せないので、赤色は安全であるという規則を表現する神経細胞集団の活動は上がらない。
仮想現実空間システムを用いる大きな利点は、現実では起こり得ない状態を動物に提示できる点です。次に、魚の尻尾の振りを仮想現実空間内での景色の後方への動きに反映させるという条件で行動学習が成立した後に、魚の尻尾の振りを景色の動きに反映させない条件に変更しました。この条件の下では、GO課題のときに周囲が青色になって、魚が赤色領域に逃げるために正しく尻尾を振っても、景色は後ろに動きません。
すると、このような状況で活動する新たな神経細胞集団を発見しました。魚の尻尾の振りを景色の動きに反映している元々の条件下の実験結果をさかのぼってみると、この新たに発見した神経細胞集団は、魚が泳がずに青色領域にとどまってしまいGO課題の遂行に失敗したときにも活性化しており、魚が泳いで赤色領域に逃げ、GO課題に成功したときは活性化していませんでした(図4、動画中の「予測誤差」)。
つまり、この神経細動集団は魚が泳ぐか泳がないかという行動には依存せず、魚が青色領域にいるとき、正しい回避行動を取っていれば景色が後ろに動くはずなのに、現実に見られる景色が動かないときにだけ活性化していたのです。これは、前に泳いで赤色領域に到達しGO課題を成功するために最適な状況に関する予測(青色領域で景色が後ろ向きに動くはず)と実際の状況(青色領域で景色が後ろ向きに動いていない)とが異なるときに活動していたと考えられます。この神経細胞集団は、トレーニングによって形成された将来の最適な状況に関する予測(GO課題成功のためには、青色領域では後ろ向きに動く景色が見える)に対する現実の状況との予測誤差を脳内で表現していると考えられます。
予測誤差を表現している神経細胞集団は、行動学習を成立させた魚のうち3分の1の魚において観察できました。そこで、この予測誤差を表現している神経細胞が、行動の選択にどのように関わっているのかを明らかにするために、予測誤差を表現する神経細動集団と色が示す規則を表現する神経細胞集団の2種類を持つ魚と、色が示す規則を表現する神経細動集団だけを持つ魚とを比べて、両者の行動様式に違いがあるかどうかを解析しました。その結果、前者のグループはゴールまで途中で休憩することなく一目散に泳ぐのに対して、後者は途中で休み休み泳いで、かろうじて制限時間内にゴールに到着することが分かりました(図5)。
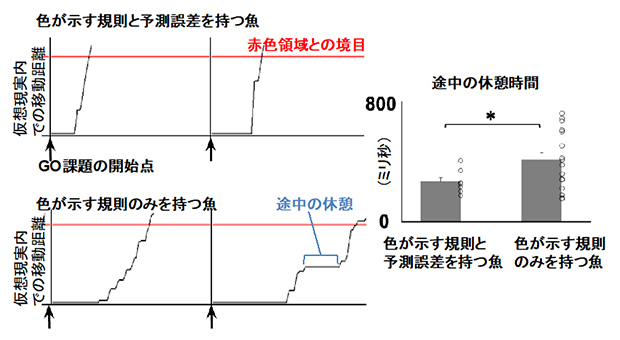
図5 色が示す規則と予測誤差の両方を持つ魚は途中で休憩することなく一目散に泳ぐ
- 左上:色が示す規則と予測誤差を表す細胞集団を持つ魚の行動学習後のGO課題における仮想現実内での移動様式。魚は途中で止まることなくゴールまで一目散に泳ぐ。
- 左下:色が示す規則の細胞集団のみを持つ魚の行動学習後のGO課題における仮想現実内での移動様式。魚は途中で休み休み泳いでゴールに到達する。
- 右:それぞれの魚の休憩時間の定量結果。
以上の結果から、最適な未来の予測(脳内モデル)と現実との予測誤差を脳内において表現する魚は、その予測誤差を最小化するように行動する、すなわち見える景色がいつも後方に移動するように休むことなく尻尾を振り続けることで、素早く最も効率的な逃避行動を取ることが明らかになりました。
今後の期待
本研究から、ゼブラフィッシュは、回避行動を取るときに安全な場所と危険な場所がどこにあるのかというハザードマップを脳内で表現できること、さらには安全地帯へと逃避するために最適な状態はこうあるべきだという予測を行う脳内モデルを形成し、それと現実の状況との比較による予測誤差を算出し、この予測誤差を最小化することを指針として、最適な危険回避行動を取るようになることが明らかになりました。
ゼブラフィッシュ成魚は、脊椎動物の中で最も単純な構造の脳を持っているため、脳全体の神経活動を捉えることができ、実験データの理論的な検証も行いやすいという利点があります。最適な未来の状況を予測することや、その実現のための行動を選択することは、脳が携わる最も重要な機能の一つと考えられます。本研究によって今後、このような脳内モデルがどのように形成され利用されるのかを、神経細胞やそれが構成する神経回路のレベルで解明するための糸口が得られました。
補足説明
- 1.ゼブラフィッシュ
インド原産の硬骨魚類に属する小型淡水熱帯魚。飼育が簡単で、一度に200個程度の卵を産み、数カ月で生殖可能な成魚に成長する。受精卵に特定の遺伝子やDNA断片を微量注入することで遺伝子改変動物を簡単に作製できる。受精後2日半で発生を完了し、胚や幼魚は透明なため、これまで動物の器官形成の仕組みを知るためのモデル実験動物として広く世界で使用されてきた。成魚を使った脳による行動制御の仕組みの研究は、理研意思決定回路動態研究チームが世界のパイオニアである。

- 2.終脳
発生学的由来から、脳は三つの部位に分けることができるが、その最も前方に位置する脳の領域。哺乳類では大脳皮質、海馬など高次機能を担う構造は終脳に存在する。 - 3.遺伝子改変ゼブラフィッシュ
遺伝子工学を用いて外から特定の遺伝子を導入し、恒常的にゲノムに組み込まれるよう改変したゼブラフィッシュ。導入する遺伝子の発現場所や時期を特定することもできる。 - 4.2光子レーザー顕微鏡
レーザー走査型蛍光顕微鏡の一種。赤外線超短パルスレーザーを顕微鏡の対物レンズを介して標本に入射して焦点付近の蛍光色素のみを励起し、標本から放出された蛍光を検出する。焦点の位置を標本の2次元平面や3次元空間の中でスキャンすることによって、コンピュータで標本の各部分の蛍光強度の分布を2次元または立体の画像として構築することができる。波長の長い赤外線を用いるため組織透過性に優れており、比較的深い領域の神経細胞の活動も捉えることができる。 - 5.非負値行列因子分解(NMF)
負の値ではない非負値のみ(0以上の値)で表現される行列を非負の固有パターンの加算のみで近似表現する方法。元の行列データ(D)が固有パターン(P)とその出現率(T)の二つの行列に分解される。共起する成分がひとまとめとして固有パターンに置かれる特徴がある。神経細胞活動に適用することで、非負値で表現した全ての神経細胞活動を固有の機能的意義を持つ個別の神経細胞集団とその活動の経時的変化に分解できる。NMFはNonnegative Matrix Factorizationの略。
共同研究グループ
実験神経科学サブグループ
理化学研究所 脳神経科学研究センター
意思決定回路動態研究チーム
チームリーダー 岡本 仁(おかもと ひとし)
研究員 鳥越 万紀夫(とりごえ まきお)
研究員 柿沼 久哉(かきぬま ひさや)
研究員(研究当時) 青木 田鶴(あおき たづ)
テクニカルスタッフ イスラム・タンヴィル(Islam Tanvir)
理論実験神経科学サブグループ
理化学研究所 脳神経科学研究センター
脳型知能理論研究ユニット
ユニットリーダー 磯村 拓哉(いそむら たくや)
沖縄科学技術大学院大学神経情報・脳計算ユニット
ユニットリーダー 深井 朋樹(ふかい ともき)
研究員 ファン・アラン・チーチュン(Fung Alan Chi Chung)
北海道大学 人間知・脳・AI研究教育センター(CHAIN)
特任准教授 島崎 秀昭(しまざき ひであき)
研究支援
本研究は、脳科学研究戦略推進プログラム(文部科学省、AMED)、新学術領域研究(文部科学省)、戦略的基礎研究(JST、AMED、JPMJCR09S1)理研・花王連携研究、理研・富士通共同研究、基礎特別研究員制度(理研)および科学研究費(文部科学省、若手研究B、18K14858)、自然科学研究機構分野融合型共同研究事業(01112005)による支援を受けて行われました。
原論文情報
- Makio Torigoe1, Tanvir Islam1,2, Hisaya Kakinuma1,2, Chi Chung Alan Fung3, Takuya Isomura4, Hideaki Shimazaki5, Tazu Aoki1, Tomoki Fukai3 and Hitoshi Okamoto1,2, *., "Zebrafish capable of generating future state prediction error show improved active avoidance behavior in virtual reality", Nature Communications, 10.1038/s41467-021-26010-7
発表者
理化学研究所
脳神経科学研究センター 意思決定回路動態研究チーム
研究員 鳥越 万紀夫(とりごえ まきお)
チームリーダー 岡本 仁(おかもと ひとし)
 鳥越万紀夫研究員(体が透明なゼブラフィッシュとともに)
鳥越万紀夫研究員(体が透明なゼブラフィッシュとともに)
 岡本仁チームリーダー(左)
岡本仁チームリーダー(左)
報道担当
理化学研究所 広報室 報道担当
お問い合わせフォーム