この動画にはナレーションはありません
理化学研究所(理研)生命機能科学研究センター集積バイオデバイス研究チームの田中陽チームリーダー、アイサン・ユスフ大学院生リサーチ・アソシエイト(研究当時)らの研究チームは、オジギソウ[1]が外界の刺激を感知して運動する機能を用いて、枝に軽く触れるだけで開閉可能な小型の弁(バルブ)を開発しました。
本研究成果は、小型で電源が不要な機械として、自律的な環境センシング・動作機能を利用した、暑熱乾燥時の放水デバイスなどへの応用が期待できます。
今回、研究チームは、オジギソウの枝に触れた際の枝の上下運動を利用したバルブを試作しました。これは、マイクロ流体チップ[2]上にマイクロ流路と液室(チャンバー)を作製したもので、チャンバーの膜上に置いた金属の錘(おもり)にオジギソウの枝が滑車を通してワイヤでつなげられ、枝が下がると錘が持ち上がり、ふさがっていた流路が開く仕組みとしました。オジギソウの力の測定では、鉢植えのオジギソウではバルブの開閉に十分な15ミリニュートン(mN)、枝部分だけを切り離した状態でも枝を二つ使えば同等の力が出せることが分かりました。バルブの動作実証実験では、バルブの開いた状態が鉢植えの枝では約8分間、枝だけの状態では約2分間持続しました。いずれもバルブの開閉を3回繰り返すことができ、耐圧は4.2kPaと、このサイズのバルブとしては圧電素子[3]を用いた既存のものに匹敵する機能を持つことを確認できました。
本研究は、オンライン科学雑誌『Scientific Reports』(5月23日付:日本時間5月23日)に掲載されました。
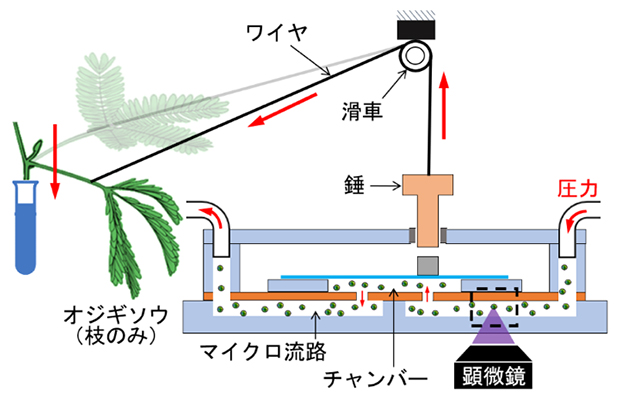
本研究で開発したオジギソウ駆動型バルブの断面図
背景
エネルギーや環境・通信・医療など、現代の科学技術のあらゆる分野において、省スペース・省エネルギー、かつクリーンな機械システムの開発が大きな課題となっています。システム全体の小型化に加え、外部からの電力供給に依存せず、材料自体も全て自然に還元される機械の開発が求められていますが、現在の機械工学では実現は困難です。
そこで、田中チームリーダーらはこれまで、細胞や生体組織の機能を搭載したデバイスを開発してきました。例えば、シビレエイの発電器官をデバイス上に搭載し、神経伝達物質を加えることで駆動する発電機注1)や、生体組織の中でも制御性や収縮力に優れるミミズの筋肉を用いて、水などの液体の流れを制御する機械であるポンプ注2)やバルブ(弁)注3)を作ることに成功しました。これらは、生体の共通エネルギー源であるアデノシン三リン酸(ATP)すなわち化学エネルギーを、電気エネルギーや運動エネルギーに効率良く変換する仕組みを応用し、材料は自然に還元されるという点で、一つの理想的な機械といえます。
このような生物機械融合デバイスをさらに発展させれば、発電機やモーターといった部品を生体組織に置き換えるだけではなく、生物が本来持つ多様な機能の集積・融合という特性を生かした自律的な多機能統合デバイスの開発にも可能性が広がると考えられます。しかし、神経や血管も含め、複雑な動物組織や切片を生かしたまま使うのは容易ではありません。
そこで今回は視点を変え、個体から切り離しても光・水・空気を供給すれば比較的容易にエネルギーを産生・機能維持ができ、倫理的問題も少ない植物の利用を着想しました。中でも、入手と増産が容易な「動く植物」オジギソウは、機械・光・熱などの多種刺激に応答し、神経のような情報伝達機能や運動機能を持つことから、スマート(多機能)デバイス素子として極めて魅力的です。オジギソウの枝や葉に手で触れると葉が閉じて、枝の付け根から葉がお辞儀をするように動きますが、1回動くと回復までに数分程度時間がかかります。そのため、短時間に速い動きを繰り返すことは困難ですが、そのようなゆっくりした動きでも水の流れを制御する装置であるバルブとしては使える可能性があります。そこで研究チームは、オジギソウの動きを生かし、軽く触れるだけで制御可能なバルブの開発を試みました。
- 注1)2016年5月31日プレスリリース「シビレエイ発電機」
- 注2)2016年10月17日プレスリリース「ミミズの筋肉を搭載した小型ポンプを開発」
- 注3)2019年7月8日プレスリリース「ミミズで弁をつくる」
研究手法と成果
オジギソウ駆動型バルブのデザインは、図1のようなものとしました。以前のミミズバルブのデザイン注1)に近いものですが、マイクロ流体チップチャンバーの上に金属の錘(おもり)を置き、これに滑車を通してワイヤでオジギソウの枝につなげその動きを伝える構造としました。オジギソウの枝を刺激する前の状態では、錘により液室(チャンバー)の入口が完全にふさがっており、外部からマイクロ流路への水流を遮断する状態となります(図1上)。オジギソウの枝を刺激すると、枝が下がって錘が持ち上がり、流路が開きます(図1下)。これを実現するため、微細加工により作製した土台となるマイクロ流体チップ上に、幅・深さ0.2mmの流路と直径8mmのチャンバーを作製し、そのチャンバーの上に厚さ0.1mmの膜を張り、錘の動きの方向を整える治具とプッシュバーを設置しました。チップの構成要素は全てシリコーンゴム[4]で作製しました。
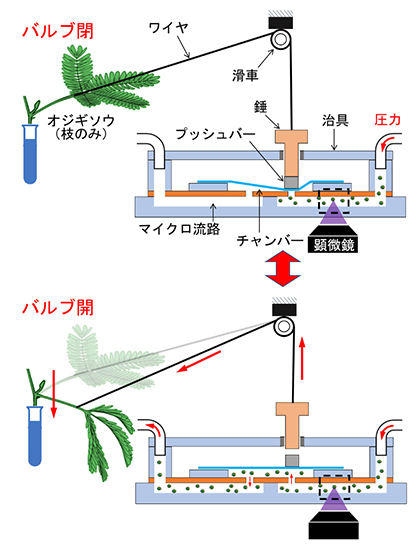
図1 オジギソウ駆動型バルブの構造と流れ制御の原理
上図はオジギソウが通常の状態のとき(バルブ閉)で、錘の重みでプッシュバーが膜を押し、流路がふさがれており、水圧がかかっていても液体が流れない。下図はオジギソウ刺激時(バルブ開)で、枝が下がると錘が持ち上がり、流路が開く。
このバルブの機能を実証するため、まずオジギソウの動きによる力の大きさを測定しました。オジギソウの枝に糸をくくり付け、上においた力センサーとつなぎ、枝を刺激した際に枝が下がるときの力の大きさを測りました。枝の状態としては、鉢植えのオジギソウの枝(図2a)と、枝をオジギソウから切り離して水を入れたチューブに挿したもの(図2b)、そして切り離した枝を2本合わせたもの(図2c)の3種類です。
いずれも、刺激後に力が発生し、約10分かけてほぼ元の状態に戻るというサイクルが見られました。力の大きさは、鉢植え状態のものが最も大きく15ミリニュートン(mN)で、切り離した状態では約9mNに下がりましたが、2本合わせれば約16mNと鉢植え状態とほぼ同じ大きさの力が得られました。また、この枝を切り離してチューブに入れた状態で2週間保持し、同様に力を測定したところ刺激への反応が見られ、力は下がったものの約7mN発生しており、生育条件さえ整えれば長期間アクチュエータ[5]として使えることが示されました。
以上の結果から、ばらつきがあるものの、力や収縮率は一般の小型バルブの圧電素子と比較しても劣らず、バルブ作製に利用可能であると考えられました。
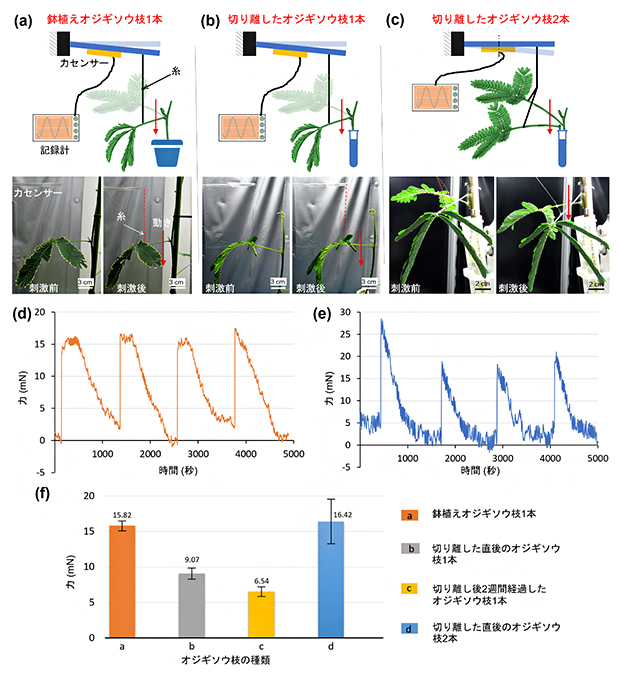
図2 オジギソウの力の測定実験
- (a-c)力測定システムのコンセプト(上図)と実際の写真(下図)。
- (a)鉢植え状態のオジギソウ枝1本の刺激時に、枝が垂れ下がる力を測定したもの。
- (b)オジギソウ本体から切り離して、一部をチューブの水に浸した状態での枝1本で測定したもの。
- (c)(b)と同じ状態の枝2本に糸をつなげて測定したもの。
- (d)(a)の状態で測定した力の時間変化。急激に力が上がるところが、刺激した時間。
- (e)(c)の状態で測定した力の時間変化。
- (f)グラフ右に記載の各状態での力の測定結果。プロットは3回測定の平均値でエラーバーは±標準偏差。
この結果に基づき、まず最も状態の良い鉢植え状態のオジギソウを用いて、バルブ開閉の動作検証実験を行いました(図3)。外部から圧力をかけてはいるものの錘により流路がふさがって水が流れないようにし、この状態でオジギソウの枝をピンセットで刺激したところ、刺激後1.4秒後に錘が持ち上がってチャンバー上のプッシュバーが浮き上がり、水が流れ始めることが確認できました。枝は徐々に上がり(錘は下がり)ますが、バルブが開いた状態は約8分間持続しました。また、休止時間20分のサイクルで3回以上繰り返し使用できることが確認できました。0.1kPaごとに送液圧力を上げたところ、4.2kPaまでは1.5gの錘によって液が止まっていたことから、耐圧は4.2kPaと測定されました。
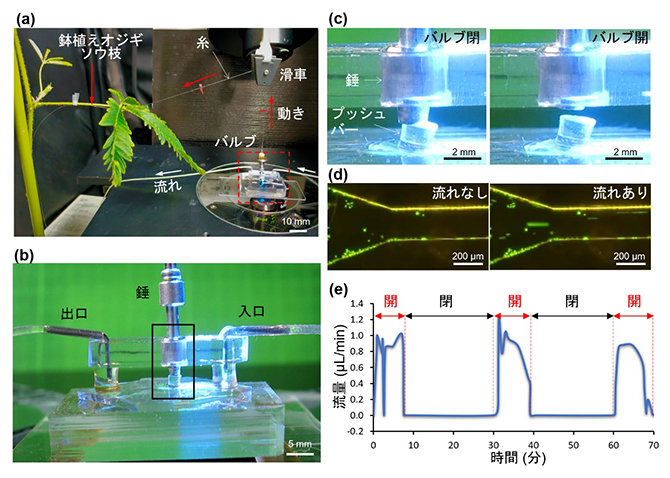
図3 鉢植え状態のオジギソウ枝を用いたバルブの実証実験
- (a)全体セットアップの写真。
- (b)チップ周辺部分の拡大写真。
- (c)錘とプッシュバー付近の拡大写真(図3bの四角部分)。(左図)オジギソウ刺激前(右図)刺激後。
- (d)マイクロ流路内の流れを、直径1マイクロメートル(μm、1μmは1,000分の1mm)の蛍光ポリスチレン微粒子(緑の輝点)で可視化して蛍光顕微鏡観察・撮影した写真。(左図)オジギソウ刺激前(右図)刺激後。右図では粒子が線状になっており、流れている様子が分かる。流れは右から左。
- (e)(d)の動画の粒子の動きから計測したマイクロ流路内の流量の時間変化。上側にバルブの開閉状態を記載。
次に、切り離して水を入れたチューブに挿してから2時間以内の枝を2本使ってバルブ機能検証実験を行いました(図4)。オジギソウ以外のセットアップは鉢植えでの実験と同様とした結果、枝をピンセットで刺激することで錘が持ち上がり、水が流れ始めることが確認できましたが、バルブが開いた状態の持続時間は約2分間となり、前回よりは短くなりました。これは2本の枝の動きが必ずしも一致していないことによるものと考えられます。一方で、休止時間20分のサイクルで3回以上繰り返し使用できることや、耐圧性能4.2kPaであることは同様に確認できました。
以上により、オジギソウ枝を切り離した状態であっても十分な耐圧性能を持つこと、また繰り返し利用可能であるという点で、このサイズのバルブとしては圧電素子を用いた既存のものに匹敵する機能を持つことを実証できました。
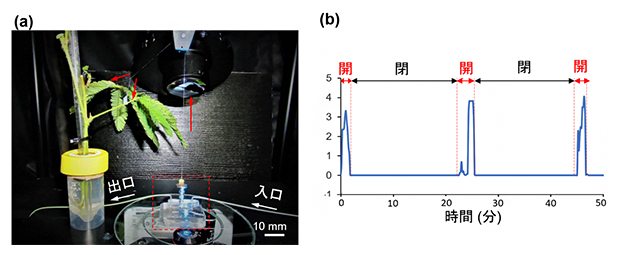
図4 オジギソウから切り離した状態の枝2本を用いたバルブの実証実験
- (a)全体セットアップの写真。
- (b)動画の粒子の動きから計測したマイクロ流路内の流量の時間変化。上側にバルブの開閉状態を記載。
今後の期待
今回開発したバルブは、植物のセンシング・運動機能を用いた機械としては、初めての例といえます。しかし、システム全体のサイズはかなり大きく、生物機械融合デバイスの一つの特徴である「小型化」には至っていません。今後、耐久性を高めるとともに、より集積度を高めたデザインにしていく必要があります。オジギソウの運動機能は、小さい枝でも、あるいは葉だけでも切り取った状態で発揮できるため、より柔軟な材料、力を効率的に伝える設計を適用することで、デバイス性能がさらに強化できると考えられます。
このような微小化を達成するれば応用も見えてきます。現状のマイクロ流体チップは、掌サイズの小さな基板に微細流路を刻み、そこに化学分析やバイオ実験などを集積化することを目指していますが、流体制御のために必要となる重厚長大な、ポンプやバルブや電源をどうするかが課題となっています。今回開発したバルブは軽く触れるだけでスマートフォンのように簡単に流れを制御でき、電源も不要のため、システム全体を非常にコンパクトにすることが可能となり、小型医療診断デバイスや生化学実験ツールなどへの応用も可能です。また、自律的な環境センシング・動作機能を利用した、暑熱による乾燥時に自動的に水やりスイッチが入るスプリンクラーのような使い方も考えられます。
今回の植物を用いた機械は、光合成でエネルギーを生み出す究極のクリーンデバイスともいえる植物の機能を搭載するという、初めての試みです。今後、理想的な機械のモデルになることが期待できます。
補足説明
- 1.オジギソウ
学名Mimosa pudica。南アメリカを原産地とするマメ科の多年草で、枝や葉に触れると葉が閉じ、枝が下に垂れるため、お辞儀をしているように見えることからオジギソウと呼ばれる。 - 2.マイクロ流体チップ
バイオ分析や化学分析(システム)をマイクロスケール化する目的で、溶液の混合、反応、分離、精製、検出などの化学操作をミクロ化したデバイスのこと。半導体製造技術(微細加工技術)を用いて基板に集積化する。 - 3.圧電素子
圧電効果を利用した受動素子のこと。圧電体に加えられた力を電圧に変換したり、電圧を力に変換したりする。アクチュエータ(駆動装置)、センサーとしての利用のほか、アナログ電子回路での発振回路やフィルタ回路にも用いられる。 - 4.シリコーンゴム
シリコーンを主成分とする樹脂。液体の状態に触媒を加えると、シリコーンの重合反応により硬化し、ゴム状になる。 - 5.アクチュエータ
直進運動や回転・曲げなど、何らかの機械的な動作を行う駆動装置のこと。
研究チーム
理化学研究所 生命機能科学研究センター 集積バイオデバイス研究チーム
チームリーダー 田中 陽(タナカ・ヨウ)
大学院生リサーチ・アソシエイト(研究当時) アイサン・ユスフ(Aishan Yusufu)
客員研究員 船野 俊一(フナノ・シュンイチ)
テクニカルスタッフ 佐藤 麻子(サトウ・アサコ)
研究パートタイマー 伊藤 友理(イトウ・ユリ)
研究員 太田 亘俊(オオタ・ノブトシ)
客員研究員 ヤリクン・ヤシャイラ(Yalikun Yaxiaer)
研究支援
本研究は、理化学研究所運営費交付金(生命機能科学研究)で実施し、日本学術振興会(JSPS)科学研究費補助金新学術領域研究(研究領域提案型)「オジギソウ搭載型植物機能利用スマートマシーン創発(研究代表者:田中陽)」などによる支援を受けて行われました。
また、基礎生物学研究所生物進化研究部門・真野弘明特任助教、長谷部光泰教授のオジギソウ育成や性質等に関する助言を受けて行われたものです。
原論文情報
- Yusufu Aishan, Shun-ichi Funano, Asako Sato, Yuri Ito, Nobutoshi Ota, Yaxiaer Yalikun, Yo Tanaka, "Bio-actuated microvalve in microfluidics using sensing and actuating function of Mimosa pudica", Scientific Reports, 10.1038/s41598-022-11637-3
発表者
理化学研究所
生命機能科学研究センター 集積バイオデバイス研究チーム
チームリーダー 田中 陽(タナカ・ヨウ)
大学院生リサーチ・アソシエイト(研究当時) アイサン・ユスフ(Aishan Yusufu)
 田中 陽
田中 陽
 Aishan Yusuf
Aishan Yusuf
報道担当
理化学研究所 広報室 報道担当
お問い合わせフォーム