2022年9月5日
理化学研究所
早稲田大学
シンガポール南洋理工大学
再充電可能なサイボーグ昆虫
-昆虫の基本動作を損なわない超薄型有機太陽電池の実装-
理化学研究所(理研)開拓研究本部染谷薄膜素子研究室の福田憲二郎専任研究員(創発物性科学研究センター創発ソフトシステム研究チーム専任研究員)、染谷隆夫主任研究員(同チームリーダー)、早稲田大学大学院創造理工学研究科総合機械工学専攻の梅津信二郎教授、シンガポール南洋理工大学の佐藤裕崇准教授らの国際共同研究グループは、光エネルギーで再充電可能な電源ユニットを含む電子部品を搭載したサイボーグ昆虫を開発しました。
本研究成果は、昆虫の寿命が続く限り、電池切れを心配することなく、サイボーグ昆虫の長時間かつ長距離の活動を可能にすることから、その用途の拡大に貢献すると期待できます。
エレクトロニクスの進歩により、生物と機械の統合が進み、特に都市型捜索救助、環境モニタリング、危険地域の検査などの用途に、行動制御モジュールを備えたサイボーグ昆虫が提案されています。
今回、国際共同研究グループは、厚さ4マイクロメートル(μm、1μmは1,000分の1mm)の柔軟な超薄型有機太陽電池[1]を、接着剤領域と非接着剤領域を交互に配置する「飛び石構造」で昆虫の腹部背側に貼り付け、再充電と無線通信が可能なサイボーグ昆虫を実現しました。飛び石構造の有効性を障害物踏破試験と起き上がり試験により定量的に評価したところ、厚さ5μm以下のフィルムであれば昆虫の基本的な動作が損なわれないことを実証しました。サイボーグ昆虫に実装した有機太陽電池モジュールは17.2ミリワット(mW)の出力を達成し、リチウムポリマー電池[2]を充電し、無線移動制御モジュールを操作することができました。
本研究は、科学雑誌『npj Flexible Electronics』オンライン版(9月5日付:日本時間9月5日)に掲載されました。

再充電可能なサイボーグ昆虫
背景
機械と生物の統合であるサイボーグは、有機体の欠陥のある部分を置き換えるだけでなく、有機体の通常の能力を超える機能を実現するためにも使用できます。特に、都市型捜索救助、環境モニタリング、危険地域の検査などの用途に、行動制御のための小さな集積回路を備えたサイボーグ昆虫が提案されています。サイボーグ昆虫は、人が到達困難な特殊な環境でも長時間活動できる魅力的なロボットです。
サイボーグ昆虫の移動を無線で長時間制御し、環境データを取得するには、10ミリワット(mW)以上を生成できる太陽電池などの環境発電装置が必要です。太陽電池の出力は面積に比例しますが、大きなデバイスはその重さと大きさから可動部の動きが制限され、昆虫の運動能力を損なうため、昆虫の運動能力を保ったまま発電装置を取り付けて、10mW以上の出力を達成するのはこれまで困難でした。そこで本研究では、柔軟で超薄型の有機太陽電池モジュールをはじめとする電子デバイスを、昆虫の基本的な運動能力を損なわずに実装することに取り組み、再充電と無線通信が可能なサイボーグ昆虫の作製を試みました。
研究手法と成果
本研究では、体長約6cmのマダガスカルゴキブリ(Gromphadorhina portentosa)[3]の背側に電子デバイスを取り付けました(図1左)。デバイスのうち、無線移動制御モジュールとリチウムポリマー電池は柔らかいバックパックを介して、昆虫の胸部背側の曲面に沿って取り付けました。厚さ4マイクロメートル(μm、1μmは1,000分の1mm)の超薄型有機太陽電池モジュールは腹部背側に取り付けました。
無線移動制御モジュールとリチウムポリマー電池を取り付けるためのバックパックは、マダガスカルゴキブリの正確な3Dモデルを基に設計し、弾性ポリマーを3Dプリントして作製しました。バックパックの昆虫と接する側は、胸部背側の曲面形状と一致する柱状構造に設計しました(図1右)。このような柱状構造によって昆虫の個体間の形状の違いによらず、曲面に完全にフィットし、硬い電子デバイスを安定的に実装できました。この接着は、繁殖環境において1カ月後でも維持されました。
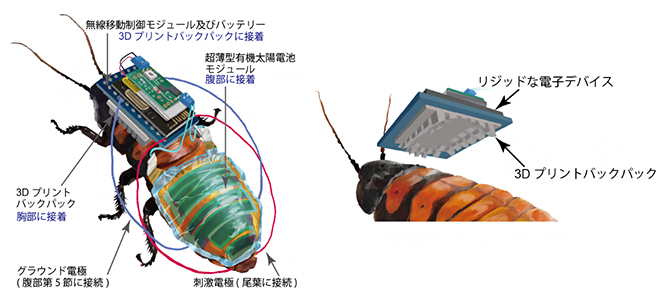
図1 サイボーグ昆虫の概要と3Dプリントバックパック
- (左)昆虫の腹部背側に超薄型有機太陽電池モジュールを接着させ、胸部背側に無線移動制御モジュールおよびバッテリー(リチウムポリマー電池)を柔らかいバックパックを介して接着させた。移動を制御する刺激信号を昆虫に入力する刺激電極は、銀ワイヤを用いて尾葉と呼ばれる感覚器官に接続している。
- (右)3Dプリンターで作製した柔らかいバックパックは、昆虫の胸部背側の曲面形状から抽出した柱状構造を持ち、昆虫が持つ個体差を許容してさまざまな個体上で電子デバイスを安定的に実装できる。
また、超薄型有機太陽電池モジュールの取り付けのため、昆虫の腹部断面を観察したところ、腹部の変形中に腹部節が部分的に重なっていることが分かりました。そこで、腹部の動きの自由度を確保するため、ポリマーフィルム(フィルム)上に作製された超薄型有機太陽電池を、接着剤領域と非接着剤領域を交互に配置する「飛び石構造」で昆虫の腹部背側へ貼り付けました(図2)。
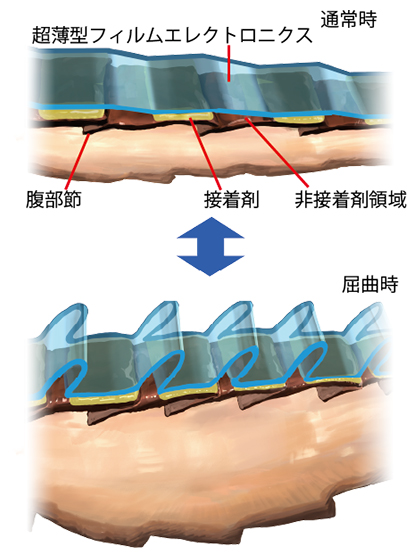
図2 超薄型有機太陽電池の腹部実装
接着剤領域と非接着剤領域から成る飛び石構造を利用することで、フィルムに変形自由度が残り、腹部の屈曲時にフィルムを外側に曲げることができる。
この方法の有効性を、障害物を通過するのに必要な時間によって定量化しました(図3)。昆虫腹部にフィルムが取り付けられていない場合は中央値2.4秒で通過したのに対して、腹部背側の腹部節が厚いフィルムで固定されていると、障害物を通過するのに必要な時間が長くなりました(中央値4.2秒)。一方、飛び石構造で厚さ3μmのフィルムを接着した場合は、フィルム無しの場合とほぼ同じ移動時間(中央値2.2秒)でした。この結果は、今回開発したフィルム実装方法が昆虫の動きの自由度を確保できることを示しています。
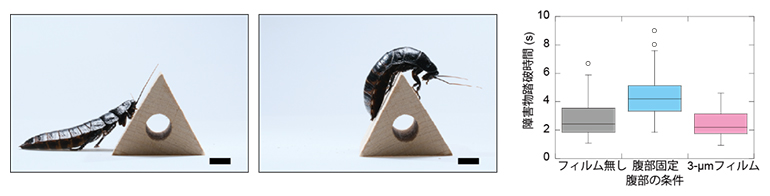
図3 障害物踏破試験
腹部のフィルムの有無を変えて、障害物踏破に必要な時間を測定した。腹部を厚いフィルムで固定した場合は踏破時間が有意に長くなる一方、飛び石構造で厚さ3μmのフィルムを実装した場合には、フィルム無しの場合とほとんど同じ踏破時間を示した。スケールバーは10mm。
さらに、起き上がり能力(地面の上でひっくり返った状態の昆虫が元の態勢に戻ることができるかどうか)を評価することで、この方法の有効性を検証しました(図4)。フィルム無しの昆虫の起き上がり成功率は99%でした。フィルムを飛び石構造で腹部背側に取り付けた場合は、厚さ5μmと10μmのフィルムの起き上がり成功率はそれぞれ96%と81%でしたが、厚さ15μmと20μmのフィルムでは、それぞれ46%と16%に低下しました。また、厚さ2μmのフィルムを飛び石構造無しで腹部に接着した場合は、起き上がり成功率は10%でした。これらの結果は、十分に薄いフィルムと飛び石構造の組み合わせが昆虫の運動性を保持することを示しています。
また、厚さ4μmの超薄型有機太陽電池モジュールを取り付けた際は、100%の起き上がり成功率を示し、超薄型有機太陽電池モジュールが昆虫の動きを完全に確保することを確認しました。以上の結果から、昆虫腹部には一定以下の柔らかさの超薄型電子素子を用いることで昆虫の基本的動作が実現可能であることが明らかになりました。
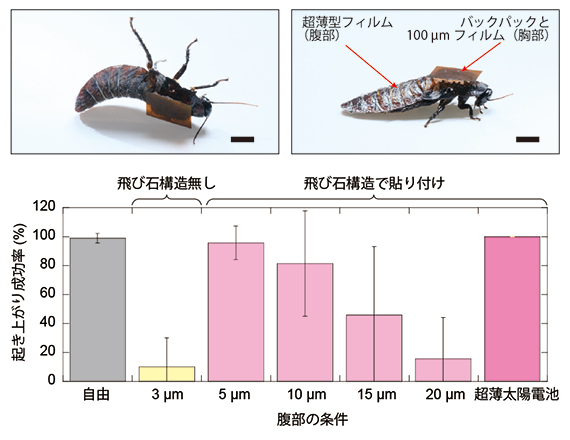
図4 起き上がり試験
- (上)背側にフィルムを取り付けたマダガスカルゴキブリを逆さまの状態で地面に置き、60秒以内に通常の状態に起き上がれるかどうか評価した。スケールバーは10mm。
- (下)腹部にさまざまな条件でフィルムを貼り付けた際の成功率。
次に、超薄型有機太陽電池モジュールの出力を調べたところ、昆虫腹部の曲面形状の有効面積を最大化することで、最大17.2mWの高出力を実現できることが分かりました(図5)。モジュールの有効面積は3.96cm2であり、これは腹部面積に対する開口率[4]51%に相当します。超薄型太陽電池の有効面積当たりの重量は約5g/m2であり、曲面上での重量当たりの電力は8.69W/gに相当します。
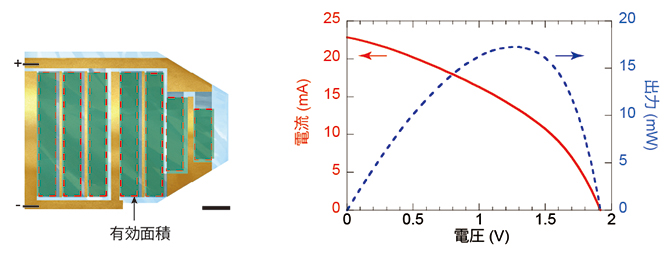
図5 サイボーグ昆虫用超薄型有機太陽電池モジュール
- (左)モジュールのデザイン。昆虫腹部の曲面に沿って超薄型有機太陽電池を配置した。赤破線で囲まれた領域が有効面積。三つの単一セルを直列につなぎ、それを二つ並列につなげるようにした。スケールバーは5mm。
- (右)超薄型有機太陽電池モジュールの昆虫曲面モデル上での電流-電圧特性(赤実線)と出力-電圧特性(青破線)。
最後に、生きたサイボーグ昆虫を用いて、充電と無線移動制御を実際に検証しました(図6)。まず、バッテリーを完全に放電し、充電する前に刺激信号が加えられていないことを確認しました。疑似太陽光をサイボーグ昆虫上の有機太陽電池モジュールに30分間照射した後、充電されたバッテリーからの電力を利用し、刺激オン・オフを制御する信号をサイボーグ昆虫に無線受信させ、約2分間にわたって昆虫尾葉に接続した刺激電極へ刺激信号を入力しました。この間、右方向への移動制御を複数回試行し、無線制御が繰り返し成功したことを確認しました。
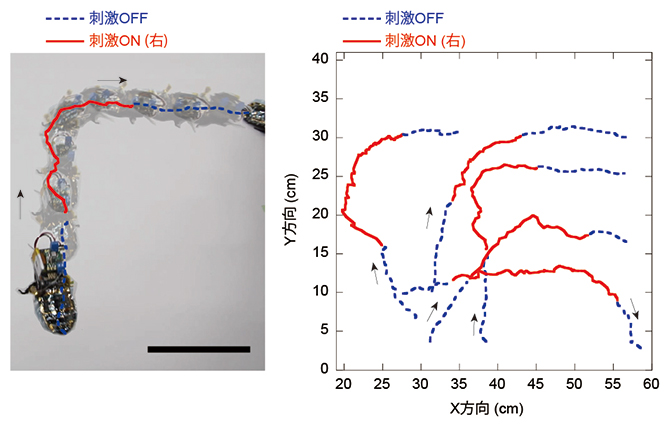
図6 再充電可能なサイボーグ昆虫の無線通信による行動制御
- (左)多重露光写真とそれに対応する移動の軌跡。青破線と赤実線は、それぞれ刺激信号オフおよびオンのタイミングを表している。スケールバーは10cm。
- (右)5回の移動制御試行の軌跡。
今後の期待
腹部の変形は多くの昆虫で見られることから、この研究で提案した飛び石構造で超薄型の電子素子を取り付ける戦略は、マダガスカルゴキブリに限らず他の昆虫種にも適用可能です。基本動作中の昆虫の胸部と腹部の変形を考慮すると、胸部に剛性または柔軟性のある要素を置き、腹部に超軟質デバイスを取り付けるハイブリッド電子システムは、サイボーグ昆虫に効果的な設計であるといえます。本成果によって、昆虫の寿命が続く限り、電池切れの心配なく長時間かつ長距離における活動が可能となり、サイボーグ昆虫の用途が拡大すると期待できます。
今後、より薄型化された制御回路を用い、センサーなど他のコンポーネントと組み合わせることで、サイボーグ昆虫の機能をさらに拡大できると考えられます。
補足説明
- 1.有機太陽電池
有機半導体を光電変換層として用いた太陽電池のこと。大量生産可能で安価かつ軽量で柔らかいことから、次世代の太陽電池として注目を集めている。 - 2.リチウムポリマー電池
リチウムイオン二次電池の一種で、電解質に高分子(ポリマー)を使用しているもの。電解液を使用していないため、リチウムイオン電池よりも液漏れしにくい。 - 3.マダガスカルゴキブリ(Gromphadorhina portentosa)
ゴキブリの最大の種の一つで、成熟すると5~7.5㎝に達する。他の多くのゴキブリと異なり、羽がないため、地上を歩行することで移動する。飼育下環境では5年程度の寿命を持つ。飛翔しないため刺激電極による行動制御を行いやすい、体長が大きいため電子回路を搭載する余地が大きい、寿命が長く環境に対する耐性が比較的高いなどの理由により、サイボーグ昆虫研究として広く利用されている。 - 4.開口率
太陽電池モジュール全体の面積に対して、どの程度を発電領域として使用しているかを表す指標。全体面積に対する発電領域の面積の割合。この数字が大きいほど全体面積を有効に太陽電池として利用できていることを示す。一般的には複数の太陽電池セルの接続、電極の取り出しや補助電極の追加、プロセス上の余白などで開口率は小さくなる。
国際共同研究グループ
理化学研究所
開拓研究本部 染谷薄膜素子研究室
専任研究員 福田 憲二郎(フクダ・ケンジロウ)
(創発物性科学研究センター 創発ソフトシステム研究チーム 専任研究員)
主任研究員 染谷 隆夫(ソメヤ・タカオ)
(創発物性科学研究センター 創発ソフトシステム研究チーム チームリーダー、東京大学大学院 工学系研究科 教授)
創発物性科学研究センター 創発ソフトシステム研究チーム
研修生(研究当時) 筧 裕二朗(カケイ・ユウジロウ)
(早稲田大学大学院 先進理工学研究科 生命理工学専攻 修士課程2年(研究当時))
研修生 片山 俊平(カタヤマ・シュンペイ)
(早稲田大学大学院 創造理工学研究科 総合機械工学専攻 修士課程1年)
研修生 髙桑 聖仁(タカクワ・マサヒト)
(早稲田大学大学院 創造理工学研究科 総合機械工学専攻 博士課程2年)
上級テクニカルスタッフ イ・シンヨン(Lee Shin-Young)
早稲田大学大学院 創造理工学研究科 総合機械工学専攻
教授 梅津 信二郎(ウメズ・シンジロウ)
シンガポール南洋理工大学
准教授 佐藤 裕崇(サトウ・ヒロタカ)
福井工業大学 環境情報学部 環境食品応用化学科
准教授 古澤 和也(フルサワ・カズヤ)
研究支援
本研究は、日本学術振興会(JSPS)科学研究費助成事業新学術領域研究(研究領域提案型)「ソフトロボット学の創成:機電・物質・生体情報の有機的融合(領域代表者:鈴森康一)」の「弾性グラディエントナノ薄膜を利用した自由変形可能な太陽電池の創成(研究代表者:福田憲二郎)」、科学技術振興機構(JST)未来社会創造事業(JST-MIRAI)「災害時にアクセスが困難な場所における生存者発見のための超環境適応ミニロボティクスシステム(研究代表者:梅津信二郎)」による支援を受けて行われました。
原論文情報
- Yujiro Kakei, Shumpei Katayama, Shinyoung Lee, Masahito Takakuwa, Kazuya Furusawa, Shinjiro Umezu, Hirotaka Sato, Kenjiro Fukuda & Takao Someya, "Integration of body-mounted ultrasoft organic solar cell on cyborg insects with intact mobility", npj Flexible Electronics, 10.1038/s41528-022-00207-2
発表者
理化学研究所
開拓研究本部 染谷薄膜素子研究室
専任研究員 福田 憲二郎(フクダ・ケンジロウ)
(創発物性科学研究センター 創発ソフトシステム研究チーム 専任研究員)
主任研究員 染谷 隆夫(ソメヤ・タカオ)
(創発物性科学研究センター 創発ソフトシステム研究チーム チームリーダー、東京大学 大学院工学系研究科 教授)
早稲田大学大学院 創造理工学研究科 総合機械工学専攻
教授 梅津 信二郎(ウメズ・シンジロウ)
シンガポール南洋理工大学
准教授 佐藤 裕崇(サトウ・ヒロタカ)
 福田 憲二郎
福田 憲二郎
 染谷 隆夫
染谷 隆夫
報道担当
理化学研究所 広報室 報道担当
お問い合わせフォーム
早稲田大学 広報室 広報課
Tel: 03-3202-5454 / Fax: 03-3202-9435
Email: koho [at] list.waseda.jp
シンガポール南洋理工大学(Nanyang Technological University, Singapore)
Lester Kok
Senior Assistant Director
Corporate Communications Office
Tel: +65-6790-6804
Email: lesterkok [at] ntu.edu.sg
※[at]は@に置き換えてください。