今日、わが家に新たな家族が増えます。私たち家族の行動や会話をなにげなく観察して心身の状態を把握し、健やかにかつ安心して暮らせるように支えてくれるロボットです。最初のうちは観察したことや類推したことを、声に出して言うのですが、やがてお互いにおしゃべりも楽しめるようになるそうです。妻は子犬のほうがいいと言いましたが、子どもたちの希望もあり、ガーディアンロボットというものにしてみました。
――このような未来が近い将来にやってくるかもしれません。

美濃 導彦(みのう みちひこ)
情報統合本部
ガーディアンロボットプロジェクト
プロジェクトリーダー
1956年京都府生まれ。京都大学大学院工学研究科博士課程修了。工学博士。1995年京都大学工学部教授、2006年京都大学学術情報メディアセンターセンター長。2010年京都大学副理事を経て2018年より理研 理事。
新プロジェクトのリーダーに
2017年、松本理事長の発案の下、新たなロボットプロジェクトの立上げに向けた議論が始まった。画像や音声などを含んださまざまなデータから一定の特徴や規則性のパターンを識別して取り出す「パターン認識」の研究に長年携わって来た美濃プロジェクトリーダー(PL)も、2018年の理研への理事としての着任後、この議論に参加するようになった。美濃PLは議論を進める中で、理研には深層学習を中心とした日本の人工知能研究の中核拠点である革新知能統合研究センター、スーパーコンピュータ「富岳」を開発する計算科学研究センター、さらには記憶や感情のメカニズムに迫る脳神経科学研究センターなどがあり、これらセンターとも連携することで、高次な知性を有するロボットを実現することができるのではないかと考えはじめた。
そのような折、松本理事長から「このプロジェクトのリーダーになってくれないか」と声が掛かり、「自分がやりたいことができるのなら」と引き受けた。「このような形で大学での研究が継続できるとは思わなかった」と美濃PLは振り返る。
つくりたいロボットをつくろう!
これまでのロボットは、単にセンサーデータをもとにアクションを起こすものが主だったが、知性を持ったロボットを作るためには、まず、センサーデータを認識し、言語化させなければならない。
画像情報から「机がある」「パソコンがある」と対象を認識して言語で表現し、さらに「机は片付いていないと不便だ。ちゃんと書類をそろえておこう」と認識した情報を元に推論して、自律的に行動できるロボットをつくりたいと美濃PLはいう。
じつは1960年代に、計算機の大きな可能性を感じた研究者達が将来そのようなロボットができるのではないかという大きな期待の下で議論を始めていた。その端緒となったのが1956年の夏に米国ダートマス大学で開かれたダートマス会議だ。ここで「人工知能(AI:Artificial Intelligence)」という言葉が初めて使われ、会議の発起人であったジョン・マッカーシーやクロード・シャノン、そしてマービン・ミンスキーたちによって、「知識とは何か、いかにして計算機上に知識を構築するか、推論などの知識処理をどうプログラムするか」などの画期的な研究が開始された。
ところが、初期の人工知能研究はあまりうまくいかず、「そこに机がある」ことさえ認識できなかった。私たち人間が常識として持っている、一般的な物の認識がロボットには大難題だったのだ。「これを契機にパターン認識という研究分野ができ、今があります」と美濃PL。
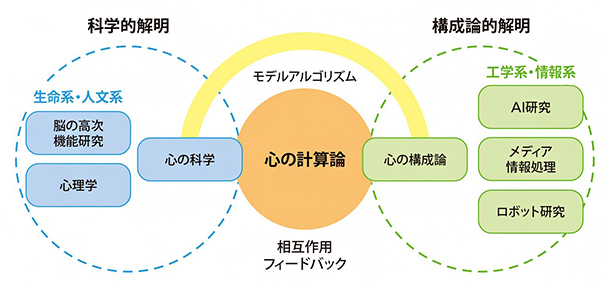
図1 新たなロボティクスプロジェクト
人間の認知機能を中心とするこころのメカニズム(知覚、認識、記憶、思考、注意、運動制御、感情、社会性)を計算論的に解明し、ロボット実装を通じて構成論的に実証する。
ガーディアンロボットの頭脳となるアーキテクチャ
センサーデータを認識して言語化し"発話"に結び付ければ、「おしゃべり」ができるロボットになる。「従来、対話ロボットと動作ロボットとは別々に研究されていましたが、このプロジェクトでは一緒にすることが本質であると考えて研究開発をしていきます」。
ロボットが対象を認識して言語化するといっても、意味をどうやって理解させるかは、非常に大きな課題だ。「今まではロボットに、例えば"椅子"は"座るもの"と教えていた。でも、これは意味の一部であって、椅子を踏み台にするかもしれないし、洗濯物を広げて乾かすかもしれない。人がものに付与する意味はその人が置かれた状況に応じダイナミックに変わる。今までのロボットにはこのダイナミックに変わる意味を適切に認識し、それに合った行動を選択するということができない……」
美濃PLはミンスキーが著書『ミンスキー博士の脳の探検 -常識・感情・自己とは-』の中で提案している「心的活動の階層モデル」を参考に、今回のプロジェクトのアーキテクチャの構想をつくった。A脳はセンサーデータをもとに外界を認識し、ロボットが行う動作の前提となる外界に関する知識をB脳に渡すためのアルゴリズム、および外界に働きかける動作を生成するアルゴリズムであり、B脳はA脳の外界に対する認識、アクションの結果を元に考えて推論し行動を起こす「主体」のアルゴリズムである。更に、C脳は実際にロボットが行った動作、その動作を行った環境およびその動作の結果などを記憶して内省し、主体の次の動作のプランを修正するアルゴリズムである。
「言語表現に意味を持たせるには、B脳以上の世界に何か自律的な主体をつくる必要がある。主体にモチベーションを与えるために、まず『目的を与える』ことにしました。そうすれば、目的に沿って知識の活用と行動の方向性を自律的に判断し、決定することができるだろうと考えています」
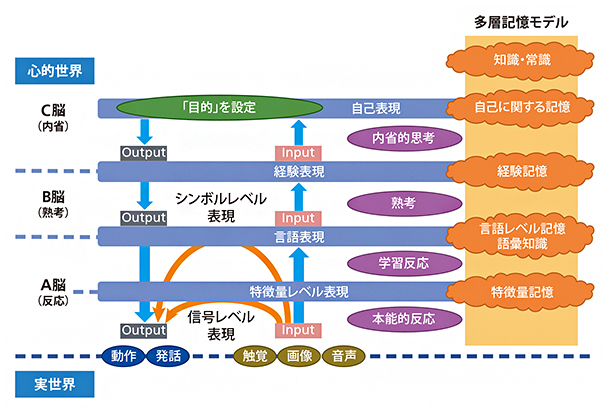
図2 ロボットの階層アーキテクチャ
ガーディアンロボット開発のマイルストーン
このプロジェクトが実質的に始まったのは、2020年9月だ。チームを組むのに1年かかったという。チームリーダーとなる優秀な若手研究者を集めるためには「こんなことやるから面白いよ」と説得できるストーリーが要る。常にそれを考えていたので、人集めが終わった時には構想は大体決まっていた。「チームリーダーが最先端の研究状況に基づいて協力して進めてくれれば、きっといいものができる」と自信をのぞかせる。
チームリーダーたちは、それぞれ言語処理、画像認識、ロボット技術など、得意分野の知識と技術と経験を持っている。情報科学・工学の分野はオープンソース化が進んでおり、認識技術も含め多くのソフトウェアも公開されているため、これらをうまく融合させれば、ガーディアンロボット開発の端緒となる「見たことをしゃべり、聞いたことをオウム返しにする」ロボットができあがるという。常に話をするからうるさいかもしれないが、その内容を聞けば、外界をきちんと認識しているかどうかも判断できるはずだ。これがガーディアンロボット試作機第1号となる仮称「ぶつくさ君」だ。
小型の市販ロボットに、移動機能を付け加え、新しく開発したソフトウェアを搭載した「ぶつくさ君」は、2021年春に起動する。さらに2021年度中には、例えば「勉強する」という目的を与えたとき、机、本、パソコンなど、目的に関連したものだけを話題にするような、少し高度な技術が搭載されたガーディアンロボット試作機第2号の完成を目指す。
「ぶつくさ君」やそれに続く自ら動き回るロボットの試作機は単体でもさまざまな機能を発揮するが、居室をはじめとして周囲の環境に張り巡らされたセンサーなどからなるネットワークにも繋げていく予定。また、人間を物理的に支援する複数のサポート型のロボット(小型の外骨格ロボットなど)も開発中で、最終的には自ら動き回るロボットとネットワークを介して協調・協働することを目指す。ネットワークを介して複数のロボットが協調・協働することで、より深く広い認識と行動が可能になり、人をさりげなく支援することができると考えている。
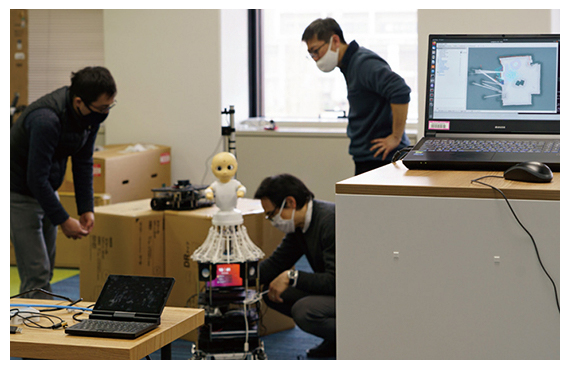
図3 ガーディアンロボット試作機第1号「ぶつくさ君」の実験の様子
「ぶつくさ君」は多くのモジュールで構成され、音声認識、物体・人物認識、環境認識、自己位置推定などの処理をするさまざまなサーバと通信をしながら応答を行う。
美濃PLは、このロボット技術で未来の社会を支えるガーディアンロボットをつくりたいと考えている。例えば、ガーディアンロボットと一緒に暮らして、心身の状態を把握し記録してもらう。高齢になって体が弱ってきたら散歩などの外出に付き添ってもらい、認知症で介護を受けるようになったら、それまでの記録を介護担当者に活用してもらう。ガーディアンロボットの記録は単なるライフログではなく、会話を通して感情や思い出などその人間の内面に触れたものなので、生活の質(QOL)を保つのに役立つだろう。目指すのはスマートフォンのような、社会生活を支える次のインフラだ。
「まずは、高齢者が、ガーディアンロボットとのコミュニケーションを楽しめればいいな、と思います。ちょっとわがままな子どもみたいなロボットで、『コラッ』と怒るとしょぼんとする、だけれどもこちらの感情を察し、楽しい思い出などを話題に仲直りをしようとする、そんな人間味のあるロボットを実現できればと思っています」
(取材・構成:由利伸子/撮影:大島拓也/制作協力:サイテック・コミュニケーションズ)
この記事の評価を5段階でご回答ください