理化学研究所(理研)生命機能科学研究センター集積バイオデバイス研究チーム田中陽チームリーダー、生命医科学研究センタートランスクリプトーム研究チームグセフ・オレグ客員主管研究員、農業・食品産業技術総合研究機構(農研機構)の黄川田隆洋主席研究員、奈良先端科学技術大学院大学先端科学技術研究科物質創成科学領域生体プロセス工学研究室のヤリクン・ヤシャイラ准教授らの共同研究グループは、宇宙などの過酷な状況でも無代謝休眠の状態で生きられる乾燥耐性生物ネムリユスリカ[1]幼虫を用いて、生物生存に適した環境での覚醒時の動きを電気的に捉えて環境センシングする生存圏探索デバイスを開発しました。
本デバイスは、さまざまな場所での環境モニタリングに用いることができ、砂漠や極地といった地球上のほか、宇宙での生存圏探索にも使える可能性があります。
今回、共同研究グループは、幼虫時に乾燥状態になると乾燥無代謝休眠(乾眠)[2]状態をとるネムリユスリカの性質を利用して、生存環境が整った時点で覚醒したときの微小な動きを検出できる微小デバイスを開発しました。これは、振動による環境発電[3]の技術を応用し、微細加工技術[4]でネムリユスリカ幼虫の小さな動きを電気的にセンシングできるようにしたものです。この電流の変動からネムリユスリカ幼虫の動きを周波数として計測し、実際に温度やpHの変化に応じて周波数が変わることを確認しました。計測対象ごとにセンサーを用いなくても、複数のパラメータを同じデバイスで計測できるため小型化も可能で、しかも無電力でセンシングできるため、長期の給電や通信が難しい極端環境でのモニタリングに極めて適したデバイスです。
本研究は、オンライン科学雑誌『iScience』(7月20日付:日本時間7月21日)に掲載されました。
覚醒したネムリユスリカ幼虫の動きを微小電極でセンシングする生存圏探索デバイス
背景
人類の発展にとって生存圏を探すこと、作り出すことは重要です。例えば、砂漠や荒れ地の緑地化、極地での生存圏確保、そして将来的には宇宙での生存圏探索といったシーンにおいて、生物生存環境の計測は欠かせません。生存圏の探索には、水・空気・温度・化学環境などさまざまなパラメータを計測する必要があります。しかし、従来のセンサーは基本的に一つのセンサーで一つのパラメータのみの探査にとどまるため、多数のセンサーを持っていく必要があります。しかも計測対象ではない未知のパラメータが生物生存に関与している可能性も否定できません。一番確実なのは、生物を実際にその環境に置き、生存できるかどうかを試してみることですが、そもそも過酷な環境で生きられる生物はほとんどなく、長期の探索も難しいという問題があります。
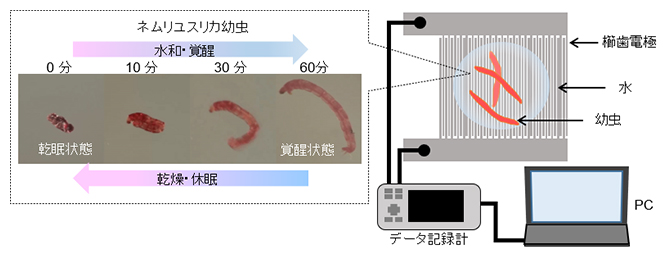
そこで、今回、共同研究グループは「ネムリユスリカ」という乾燥耐性生物に着目しました注1)。ネムリユスリカはアフリカの半乾燥地帯に生息する昆虫で、その幼虫は、乾季になると動きを止め、乾眠状態になりますが、一定の水と温度があれば覚醒します(図1a)。しかも乾眠状態では、宇宙空間に一定期間(最長で2.5年)放出しても、その後再覚醒することも分かっています。この性質を利用して、生存圏が見つかれば覚醒し、動き出したことを検知する、生存圏探索バイオセンサーができないかと着想しました。
動きをモニタリングするには通常はカメラを用いますが、常時電力が必要となり、宇宙など電力の供給ができない場所での長期使用は現実的ではありません。そこで、微細加工技術を利用した環境発電技術を用い、生物の動きによる発電を利用することで、無電力でも小さな動きを捉えられないかと考えました。特徴的な生物の動きを電気に変換し、これに対応するシグナルが入力されれば、モニタリングを開始・通信するようなシステムを構築することで必要な電力を最小限に抑え、長期的なモニタリングが可能となります。これは、田中陽チームリーダーらがこれまでに進めてきた生物機械融合デバイス注2、3)の新たな展開でもあります。
以上の発想に基づき、本研究では、まず映像データからネムリユスリカ幼虫の動きを把握し、次にデバイスを用いたネムリユスリカ幼虫の動きのモニタリング実証、さらに環境センシングの例として、温度・pHによる信号の変化を確認しました。
- 注1)2018年3月8日プレスリリース「極限的な乾燥耐性をつかさどる制御因子を同定」
- 注2)2016年10月17日プレスリリース「ミミズの筋肉を搭載した小型ポンプを開発」
- 注3)2022年5月23日プレスリリース「オジギソウ駆動型バルブ」
研究手法と成果
乾燥無代謝休眠(乾眠)状態のネムリユスリカ幼虫は、水を与えると通常1時間以内に覚醒し、動き出します(図1a)。ただし、この動きの振幅は1~2mm以下と小さく、これを捉えるため、幅80マイクロメートル(μm、1μmは100万分の1メートル)、隙間40μmの櫛歯型の電極をデザインしました(図1b)。電気信号は外部のデータ記録計に接続して計測・記録し、PC上でこれを制御します。ネムリユスリカ幼虫の表面は水中で負に帯電しているため、この微小電極上でネムリユスリカ幼虫が動くと、その動きに応じて電極上の電荷が移動して、電流が発生します。この電流の変動から、幼虫の動きの周波数を測定できます(図1c)。
また、ネムリユスリカ幼虫は電極サイズから見れば比較的大きく、また個体差が大きいため、集団での平均的な動きを捉える必要があります。そのため、大面積をカバーできる電極設計とし、10匹を電極上に設置した直径1cmのプールに入れる構造としました。
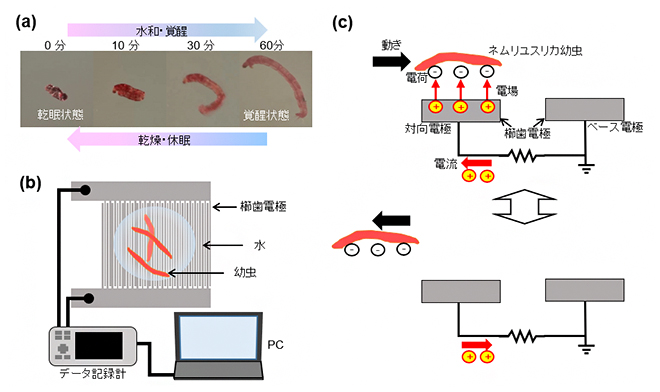
図1 デバイスのデザインと原理
- (a)乾眠状態から覚醒状態へ、またその逆のプロセス中のネムリユスリカ幼虫の様子を示した写真。
- (b)デバイスのデザインと実験セットアップ。
- (c)ネムリユスリカ幼虫の動きによる発電とそれによる動きのセンシングの原理。櫛歯電極上でネムリユスリカ幼虫が動くと、その動きに応じて電極上の電荷が移動し、電流が発生する。
まず、デバイスでの実験前にネムリユスリカ幼虫がどのような動きをするか、画像から大まかに把握する実験を行いました。実験は24個の穴(ウェル)を持つウェルプレートを用いて、各ウェルに1匹ずつ乾眠状態のネムリユスリカ幼虫と15mLの水を入れ、ヒーターの上に載せて上方からビデオカメラで30分ごと8時間後まで動画撮影し、各時間での挙動を解析しました(図2a、b)。また、同じ実験を10~50℃の温度範囲で、10℃刻みで測定を行い、温度での違いも検証しました。
その結果、20~40℃の条件では、3時間以内に半数以上が覚醒し、30℃で覚醒率が最も高くなりました。また、最もよく(速く)動いた個体の周波数は、覚醒数と同様の温度・経過時間に従う傾向のグラフとなりましたが、2時間以降では動きはあまり変わらないか、やや落ちる傾向にあり、動きの周波数は最大で約2.5Hz(1秒間に約2.5回の振動)となりました(図2c、d)。以上の実験から、動きの個体差が大きいため、温度などのセンサーとして用いるには、複数のネムリユスリカ幼虫を用いる必要があることが分かりました。
また、ネムリユスリカ幼虫をすりつぶし、電気泳動光散乱測定法[5]によりネムリユスリカ幼虫の表面電位を測定したところ、-21mVとなり、確かに一定の負電荷を持っていることが明らかになりました。
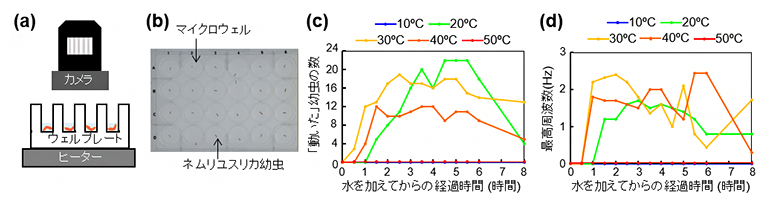
図2 画像によるネムリユスリカ幼虫の挙動把握実験
- (a)実験セットアップの断面図。カメラは全24ウェルが視野に入るようにルーズで撮影。
- (b)カメラによる撮影画像。
- (c)カメラ画像中24匹のネムリユスリカ幼虫のうち、動いていた個数の各温度での時間変化。
- (d)カメラ画像中24匹のネムリユスリカ幼虫のうち、最もよく(速く)動いていた個体の各温度での周波数(最高周波数)の時間変化。
以上の結果に基づき、ネムリユスリカ幼虫の動きをビデオカメラの代わりに電気信号で捉えるデバイスを作製し、実験を行いました。ニッケルを用いて、微小櫛歯型電極をガラス基板上でリフトオフ法[6]により作製し、断線や絶縁破壊などがないことを目視および電気測定により確認しました(図3a、b)。このデバイス上のプールに乾眠状態のネムリユスリカ幼虫を10匹入れ、水を入れてネムリユスリカ幼虫の動きを電気信号のデータ記録で確認しました(図3c、d)。
まず先述した動画撮影の結果から、最もよく動く条件である30℃、加水2時間後でデータを取得しました。電圧の時間変化を見ると、水のみを入れた対照データに比べ、ネムリユスリカ幼虫を入れたものでは明らかに波が見えており、その電圧の振幅は約0.11mVでした(図3e)。デバイスの抵抗値から計算した電流値は720ナノアンペア(nA、1nAは10億分の1アンペア)、発電量は80ピコワット(pW、1pWは1兆分の1ワット)となります。この結果より、幼虫の動きによる発電が実証できたといえます。ただし、電気信号は小さく、電気信号データのみではネムリユスリカ幼虫の特徴ある動きを捉えられているかの判別が難しいという問題がありました。
そこで、電圧データがどのような周波数特徴を持っているかを示すために、高速フーリエ変換[7]を行いました。すると、画像データでの特徴と一致する1~2Hzのところにピークを持つスペクトルが得られました(図3f)。以上より、今回得られた電圧は確かにネムリユスリカ幼虫の動きを捉えたものだと判断できました。
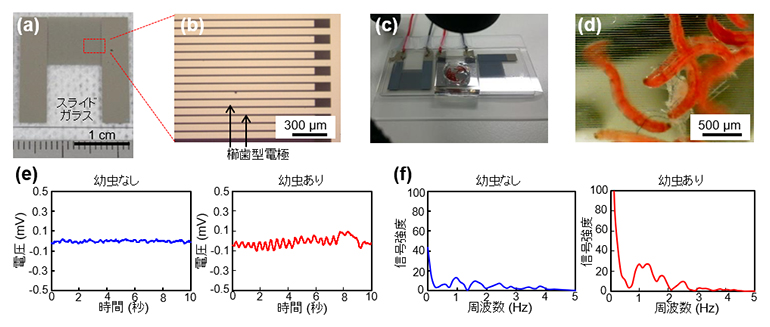
図3 ネムリユスリカ幼虫の運動による発電実証実験
- (a)スライドガラス上に作製した1ペアの櫛歯型電極の全体写真。
- (b)櫛歯電極の拡大写真。肌色部分が電極、黒色部分はガラス。
- (c)プール内にネムリユスリカ幼虫と水を入れた状態のデバイス全体写真。
- (d)プール内で覚醒後、櫛歯型電極上で動いているネムリユスリカ幼虫の写真。
- (e)ネムリユスリカ幼虫がない状態(左)、および動いているネムリユスリカ幼虫が10匹いる状態(右)での電極間電圧の時間変化。サンプリングレートは0.001秒だが、ノイズ除去のため0.2秒ごとの移動平均を表示。
- (f)ネムリユスリカ幼虫がない状態(左)、および動いているネムリユスリカ幼虫が10匹いる状態(右)で取得した電圧時間変化を高速フーリエ変換したもの。縦軸(信号強度)は横軸の周波数成分の分布を表す。
次に、このデバイスを用いた環境センシングの例として、温度およびpHをモニタリングできることを実証する実験を行いました。まず、映像で捉えられた温度別のネムリユスリカ幼虫の動きの大まかな違いを、デバイスを用いて的確に捉えられるかを検証しました。10℃、20℃、30℃、40℃、50℃の各温度の水を加えて2時間後のフーリエ変換後のデータを見ると、30℃で全体的に値が大きくなっていることが分かりました(図4a)。
ただし、この「全体的に大きい」を活動量として定量的に表すには、さらに別の処理が必要となります。ここでは、ノイズの影響が大きくバックグラウンドが高く出てしまうため0.2Hz以下の値はカットし、映像からネムリユスリカ幼虫の動きの周波数の上限と考えられる4Hzまでの間の周波数で積分をとり、これを「活動量」と定義しました(図4b)。活動量を温度ごとにプロットすると、映像からのデータと同様に30℃で明確にピークが見られたほか、40℃での微妙な活動量なども数値化・グラフ化できました(図4c)。以上より、デバイスにより活動量を指標として評価できるとともに、温度センシングに利用できることが分かりました。
さらに、本デバイスを物理パラメータの一つである温度だけでなく、化学パラメータの一つであるpHのセンシングにも利用できないかと考えました。緩衝液[8]を用いて、pH2からpH13まで1または2刻みで変えたときのフーリエ変換のグラフ(図4d)、および活動量のグラフ(図4e)より、pH=7付近でピークが見られ、また酸性の方がアルカリ性より若干耐性があることが分かりました。以上より、化学センサーとして使える可能性も実証できたといえます。
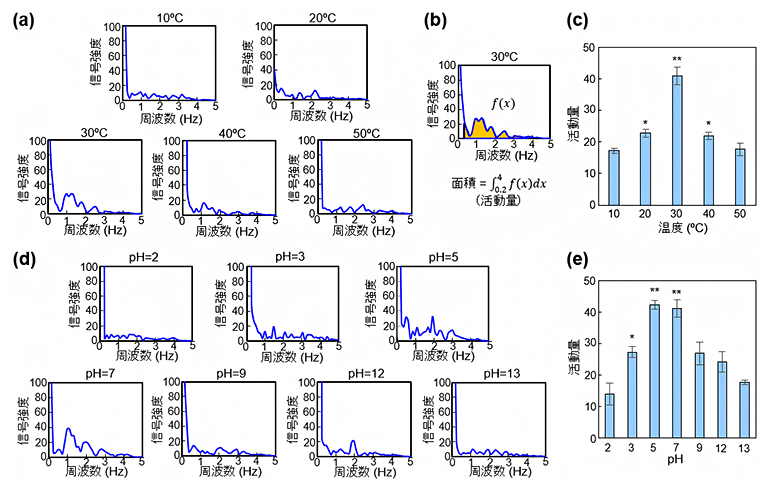
図4 温度およびpHのセンシング実証実験
- (a)各温度でのデバイスに乾眠状態のネムリユスリカ幼虫および水を加え、1時間後の電位時間変化データを高速フーリエ変換したグラフ。
- (b)ネムリユスリカ幼虫の「活動量」の定義の説明。高速フーリエ変換データを0.5~4Hzの間で積分したもの(グラフの橙色の部分の面積)。
- (c)温度と活動量の関係。プロットは3回測定の平均値でエラーバーは±標準誤差。
*: 有意確率p<0.05、**: 有意確率p<0.01で対照(10℃のデータ)に対して有意差あり。 - (d)各pH条件でデバイスに乾眠状態のネムリユスリカ幼虫およびpH調整済みの緩衝液を加え、1時間後の電位時間変化データを高速フーリエ変換したグラフ。なおpH=2は、全ての個体が活動しない対照実験。
- (e) pHと活動量の関係。プロットは3回測定の平均値でエラーバーは±標準誤差。
*: 有意確率p<0.05、**: 有意確率p<0.01で対照(pH=2のデータ)に対して有意差あり。
今後の期待
今回開発したデバイスは、生物機械融合デバイスとしては発電デバイスの一種ですが、発電量は80pWと非常に小さいものです。従って、それ単独でロガーや解析システム、通信などのデバイスへの給電まで行うのは困難ですが、スタンバイ状態の機器始動のトリガーとしては使える可能性が十分にあります。通常の状態では電力をほとんど使わない状態で待機して、ネムリユスリカ幼虫が動き出したらモニタリングや解析をして、通信するというシステムなら最小限の電力で済み、小型の電池でも数年間もたせることは可能と考えられます。
また今回のデバイスは、生物の多様なセンシング能力を「動き」という発現系に落とし込み、これを電気信号という一つのパラメータで検出できるという特徴があり、さまざまなパラメータを同時に検出できる可能性もあります。そのためには今後データを増やし、機械学習[9]を用いて環境パラメータと信号の相関を紐づけていくことが課題となります。
以上のような課題を解決することで、本デバイスは、宇宙のみならず、地球上でも水・温度・化学状態などの検出デバイスとして環境のモニタリングや生存圏の探索への応用が期待できます。
補足説明
- 1.ネムリユスリカ
干からびても死ぬことなく、水をかけると成長を再開する能力を持つ昆虫。この乾燥耐性は、幼虫期のみに認められる。ナイジェリアなどのアフリカ北部の半乾燥地帯(サヘル地帯)の水たまりに生息する。学名は、Polypedilum vanderplanki。 - 2.乾燥無代謝休眠(乾眠)
干からびても死なない能力。英語では、anhydrobiosis("水がない状態の生命"の意味)と呼ばれる。ネムリユスリカ以外では、細菌、酵母、カビの胞子、線虫、ワムシ、クマムシ、アルテミアの耐久卵、植物の種子、復活草などに認められる。脊椎動物には、この能力を持つ生物は存在しない。 - 3.環境発電
熱や光、振動、電磁波などのエネルギーを電力に変換する発電方法。エネルギーハーベスティング(Energy Harvesting)とも呼ばれる。多数の小型センサーの電源として期待されており、電池の交換が不要なので半永久的に使用でき、環境にも優しいという特徴がある。本研究では振動発電法を応用している。 - 4.微細加工技術
光や電子線などを用いることで、半導体や金属、ガラスなどを精密に加工する技術でコンピュータの素子作製などに使われる。髪の毛や蚊の針の太さ(10~100μm)と同じか、それ以下の構造物を作製できる。 - 5.電気泳動光散乱測定法
表面電位測定法の一つ。粒子分散溶液に電場をかけた際に、等速で移動する分散質の速度を散乱される光から測定することで、粒子の電位を計測する。 - 6.リフトオフ法
光照射することで溶解する性質を持つフォトレジストを塗布・露光した後の基板に金属を成膜し、その後剥離液によってレジストを除去することで、基板上のパターニング領域にのみ、金属を残す手法。微細加工プロセスとしてよく用いられる。 - 7.フーリエ変換
周期的な変動成分を持つ実験データの波形を周波数成分に分解して表示するデータ処理の手法。周波数ごとの信号の大きさをスペクトル(強度分布)で表す。今回用いた高速フーリエ変換は、データ個数を2のn乗個に制限することで処理速度を速めたものである。 - 8.緩衝液
外から少量の酸や塩基を加えてもpHが大きく変化しないようにした溶液のこと。 - 9.機械学習
膨大なデータをコンピュータに入力し、その中にある既知の特徴を繰り返しコンピュータに学習させるか、もしくはデータそのものからコンピュータに規則性を発見させることで、未知のデータに対する解答を自動で得る手法。
研究チーム
理化学研究所
生命機能科学研究センター 集積バイオデバイス研究チーム
チームリーダー 田中 陽(タナカ・ヨウ)
大学院生リサーチ・アソシエイト マ・トウトウ(Ma Doudou)
技師(研究当時) 天谷 諭(アマヤ・サトシ)
大学院生リサーチ・アソシエイト(研究当時) アイサン・ユスフ(Aishan Yusufu)
客員研究員 シン・キゴウ(Shen Yigang)
客員研究員 船野 俊一(フナノ・シュンイチ)
生命医科学研究センター トランスクリプトーム研究チーム
客員主管研究員 グセフ・オレグ(Gusev Oleg)
農研機構 生物機能利用研究部門 生物素材開発研究領域
機能利用開発グループ
主席研究員 黄川田 隆洋(キカワダ・タカヒロ)
主席研究員(研究当時) 奥田 隆(オクダ・タカシ)
奈良先端科学技術大学院大学 先端科学技術研究科 物質創成科学領域
生体プロセス工学研究室
大学院生 タン・タオ(Tang Tao)
教授 細川 陽一郎(ホソカワ・ヨウイチロウ)
准教授 ヤリクン・ヤシャイラ(Yalikun Yaxiaer)
研究支援
本研究は、理化学研究所運営費交付金(生命機能科学研究)、同バトンゾーン研究推進プログラムエンジニアリングネットワーク制度により実施し、日本学術振興会(JSPS)科学研究費助成事業挑戦的研究(萌芽)「生物と機械のハイブリッドロボットによる海底・宇宙探索(研究代表者:田中陽)」などによる支援を受けて行われました。
原論文情報
- Yo Tanaka, Doudou Ma, Satoshi Amaya, Yusufu Aishan, Yigang Shen, Shun-ichi Funano, Tao Tang, Yoichiroh Hosokawa, Oleg Gusev, Takashi Okuda, Takahiro Kikawada, Yaxiaer Yalikun, "Anhydrobiotic chironomid larval motion-based multi-sensing microdevice for exploration of survivable locations", iScience, 10.1016/j.isci.2022.104639
発表者
理化学研究所
生命機能科学研究センター 集積バイオデバイス研究チーム
チームリーダー 田中 陽(タナカ・ヨウ)
生命医科学研究センター トランスクリプトーム研究チーム
客員主管研究員 グセフ・オレグ(Gusev Oleg)
農研機構
主席研究員 黄川田 隆洋(キカワダ・タカヒロ)
奈良先端科学技術大学院大学
先端科学技術研究科 物質創成科学領域 生体プロセス工学研究室
准教授 ヤリクン・ヤシャイラ(Yalikun Yaxiaer)
 田中 陽
田中 陽
報道担当
理化学研究所 広報室 報道担当
お問い合わせフォーム
農研機構 本部広報部広報課 報道チーム
Tel: 029-838-6005
Email: nias-koho [at] ml.affrc.go.jp
奈良先端科学技術大学院大学 企画総務課 渉外企画係
Tel: 0743-72-5026/5063 / Fax: 0743-72-5011
Email: s-kikaku[at]ad.naist.jp
※上記の[at]は@に置き換えてください。